

























IDX Manual (V1.15 / September 26
th
, 2008)
19
Copyright © 2005-2008, TRINAMIC Motion Control GmbH & Co. KG
Examples:
1.
Set chopper mode to SPI Mode:
AM 0
ENTER
2.
Read out the actual mode
Am
ENTER
5.8.1.1
Examples for test move
Different accelerations and velocities
AA 500, AV 50000, AV –50000
try other AA 100…8000, AV 0…400000
Max. current – test of torque
AA 500, AV 50000, AC 255
test torque manually
AC 50
test torque
Read and set position
AR, AP 0, AR, AA 500, AV 50000, AR
5.8.1.2
Motor Current (C)
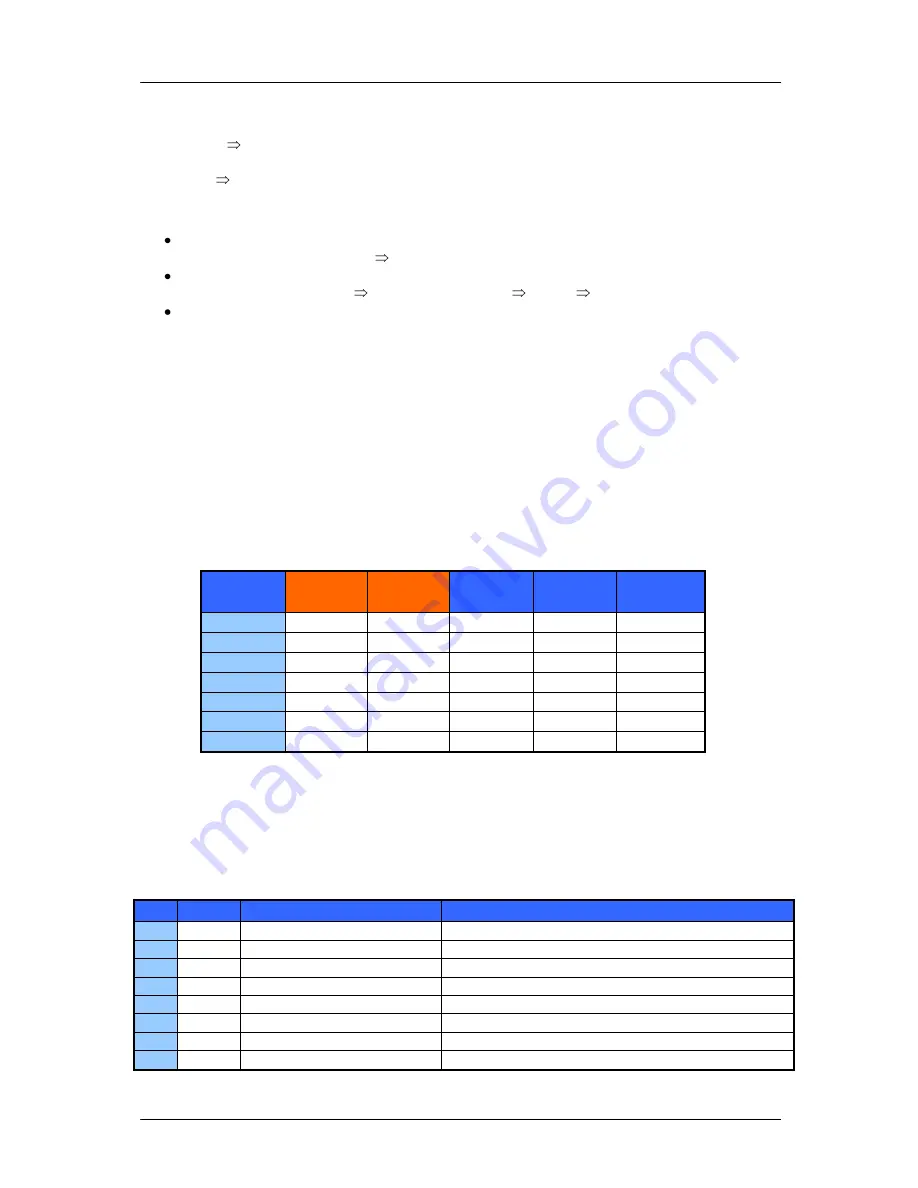
The motor current can be set by the user. To do this use the RS485 command “AC” in addition with a
percent value. To calculate the actual setting, please use the 100% values as shown in the table.
Internally the current is regulated by two independent parameters for the best module/motor
performance possible.
For chopper mode 2, the maximum setting is about 75% to 90% - at higher settings, motor microstep
behaviour may become harsh. The actual maximum depends upon the actual motor. This is to avoid
the motor coil current raising above the 100% setting at any time. Not all currents can be
continuously driven at all supply voltages / cooling circumstances.
Please refer to motor current
limitations.
AC
I
COIL,PP
IDX 7505
I
COIL,RMS
IDX 7505
I
COIL,PP
IDX
I
COIL,RMS
IDX
% to max.
I
COIL
100
7.1A
5.0A
4.8A
3.4A
100% *)
75
5.3A
3.8A
3.6A
2.6A
75%
66
4.7A
3.3A
3.2A
2.2A
66%
50
3.5A
2.5A
2.4A
1.7A
50%
33
2.4A
1.7A
1.6A
1.1A
33%
25
1.8A
1.26A
1.2A
0.85A
25%
10
0.71A
0.50A
0.5A
0.35A
10%
Table 5.3: Motor Current Examples for IDX
*) Not possible for chopper mode 2.
5.8.1.3
Failure Readout (E)
The IDX provides a full driver failure analysis in SPI mode (8 Bit). The returned bit assignments are as
follows:
Bit
Name
Function
Remark
7
OT
Overtemperature
“1” = driver chip off due to overtemperature
6
OTPW
temperature prewarning
“1” = driver chip prewarning temperature exceeded
5
UV
driver undervoltage
“1” = undervoltage on VS – does not cover all cases
4
OCHS
overcurrent high side
(not available in current hardware implementation)
3
OLB
open load bridge B
Open load detection can occur at fast motion also.
2
OLA
open load bridge B
Open load detection can occur at fast motion also.
1
OCB
overcurrent bridge B low side Short circuit detected. Please check motor wiring.
0
OCA
overcurrent bridge A low side Short circuit detected. Please check motor wiring.
Table 5.4: Failure readout in SPI mode







































































