Machine Measur
ements and Configuration
Taking Machine Measurements
37
Excavator Indicate System
P/N: 1022461-01
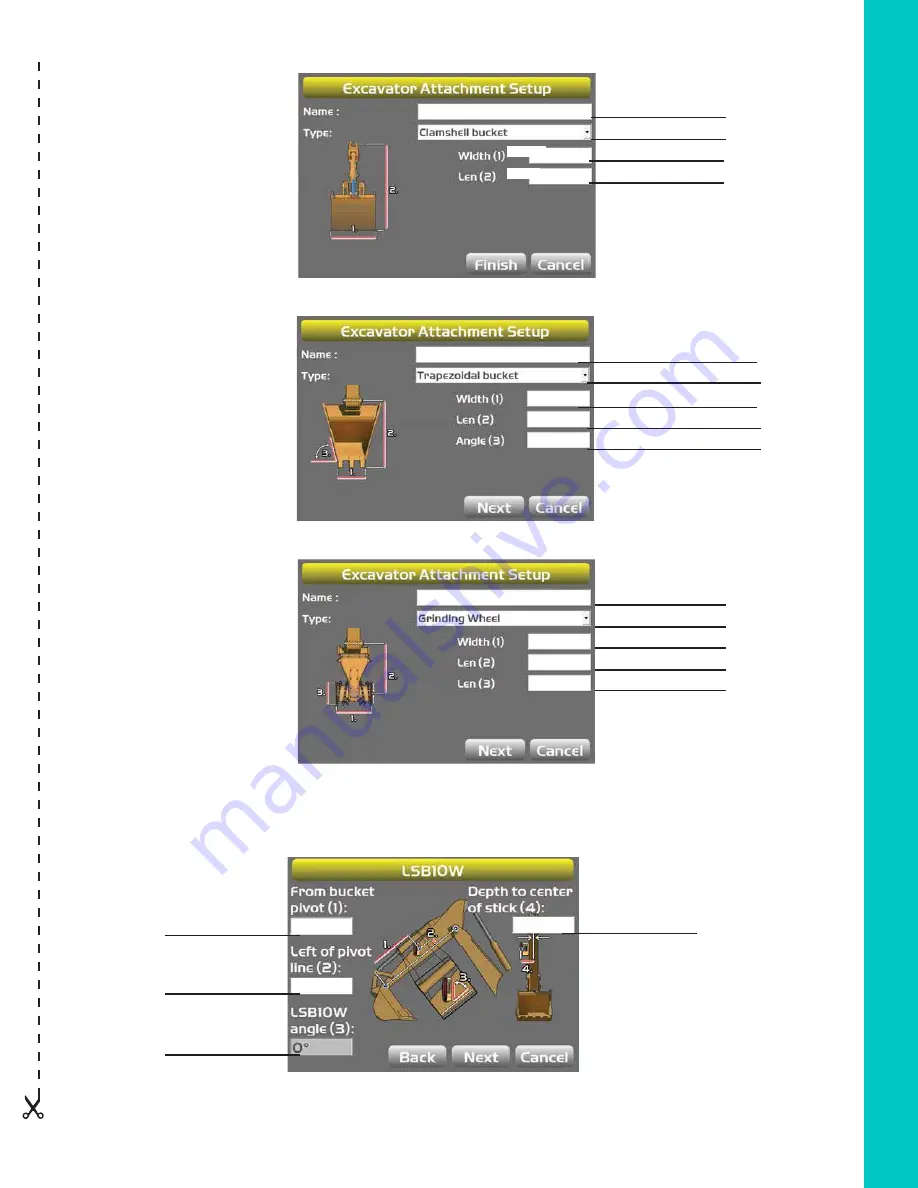
L
S
-B10W
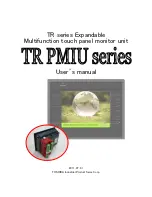
ƩĂĐŚŵĞŶƚ^ĞƚƵƉ
ůĂŵƐŚĞůůƵĐŬĞƚ
ƩĂĐŚŵĞŶƚ^ĞƚƵƉ
dƌĂƉĞnjŽŝĚĂůƵĐŬĞƚ
ƩĂĐŚŵĞŶƚ^ĞƚƵƉ
'ƌŝŶĚŝŶŐtŚĞĞů
ĞƉƚŚĨƌŽŵĞŶƚĞƌůŝŶĞŽĨ^ƟĐŬ
Distance from Bucket Pivot
to LSB10W
Distance from Left of Pivot
Angle to the Stick Centerline
Note: Only determinded during
calibration of the machine.