





Timpdon Marine
Tel 0161 - 980 8054
Issue 1 – May 2011
Web
www.timpdon.co.uk
EMail [email protected]
Principles of Operation
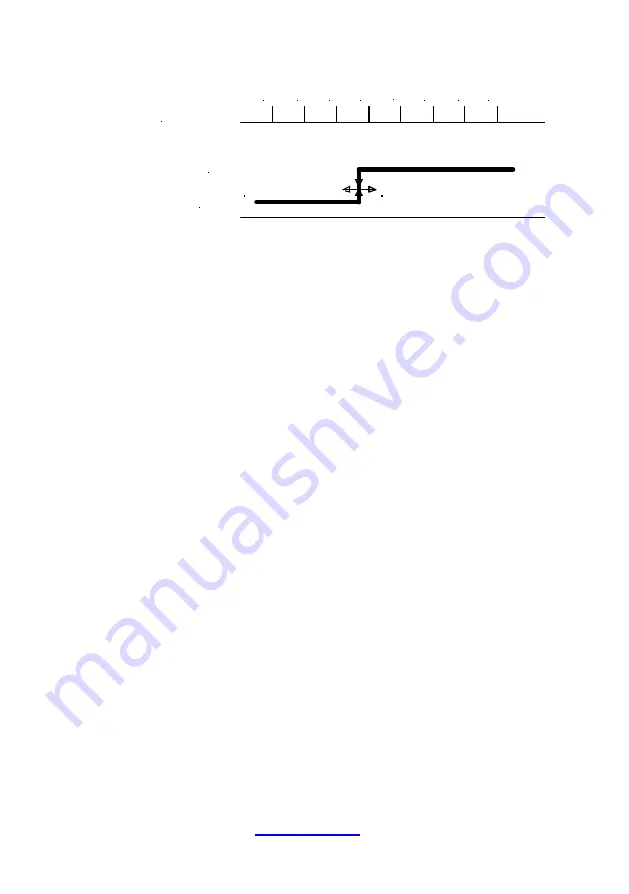
0.8
1.0
1.2
1.4
1.6
1.8
2.0
2.2
RC Pulse
Width in ms
Set
Reset
Switches from
Reset
to
Set
on
rising
pulse width
Switches from
Set
to
Reset
on
falling
pulse width
1
In a standard RC system, the output from each receiver channel is a
variable width pulse, nominally between 1.0 ms and 2.0 ms in width,
repeated at intervals of approximately 20 ms. A pulse width of 1.0 ms
corresponds to the transmitter control at
minimum
, 2.0 ms to
maximum
and 1.5 ms to
centre
.
2
The
MRSS3
is specifically designed for operation on switched, slow
slew rate digital channels where, when the channel control switch is
operated, the output pulse width moves from 1.0 ms to 2.0 ms, or vice
versa, over a period of several seconds. Such channels are commonly
intended for operation of aircraft undercarriage controls, or similar. The
MRSS3
is designed to detect the
changing
pulse width and thus
operate the output servo immediately, without any delay.
2
Within the
MRSS3
, the servo output is limited to one of two actions,
depending on the setting,
0
or
1
, of the transmitter control switch:
Channel Switch
Action
1 = Maximum
Rotate to programmed
set
position
0 = Minimum
Rotate to programmed
reset
position
The rotation rate of the servo, at all times, is constant.
Note that the sense of the switch [
0
or
1
] with respect to
maximum
or
minimum
may be reversed on some transmitters.
3
The servo output pulse widths corresponding to the
1
and
0
control
switch positions [
set
and
reset
] are user programmable, as is the
rotation rate
of the servo between these positions. The available
range of servo output pulse widths is 0.6 ms to 2.4 ms.





















































