












Page 8
ETN043212-D02
DRV225 and DRV250 Stepper Motor Actuators
Chapter 4 Specifications
4.1 Specifications
a. The unit requires a pre-load in order to function properly and should be used only for pushing loads, do not use for pulling.
b. Although feedback is not provided within the actuator, closed loop control can be achieved by using the LNR50SE stage -
see www.thorlabs.com for further details.
4.2 How to Calculate the Linear Displacement
The DRV series motors have 200 full steps per revolution and when driven by the BSC20x or MST602 drivers there are 2048
microsteps per full step, giving 409,600 microsteps per revolution of the motor lead screw. The lead screw pitch is 1.0 mm
The linear displacement of the lead screw per microstep:
1 / 409600 = 2.4 x 10
-6
mm
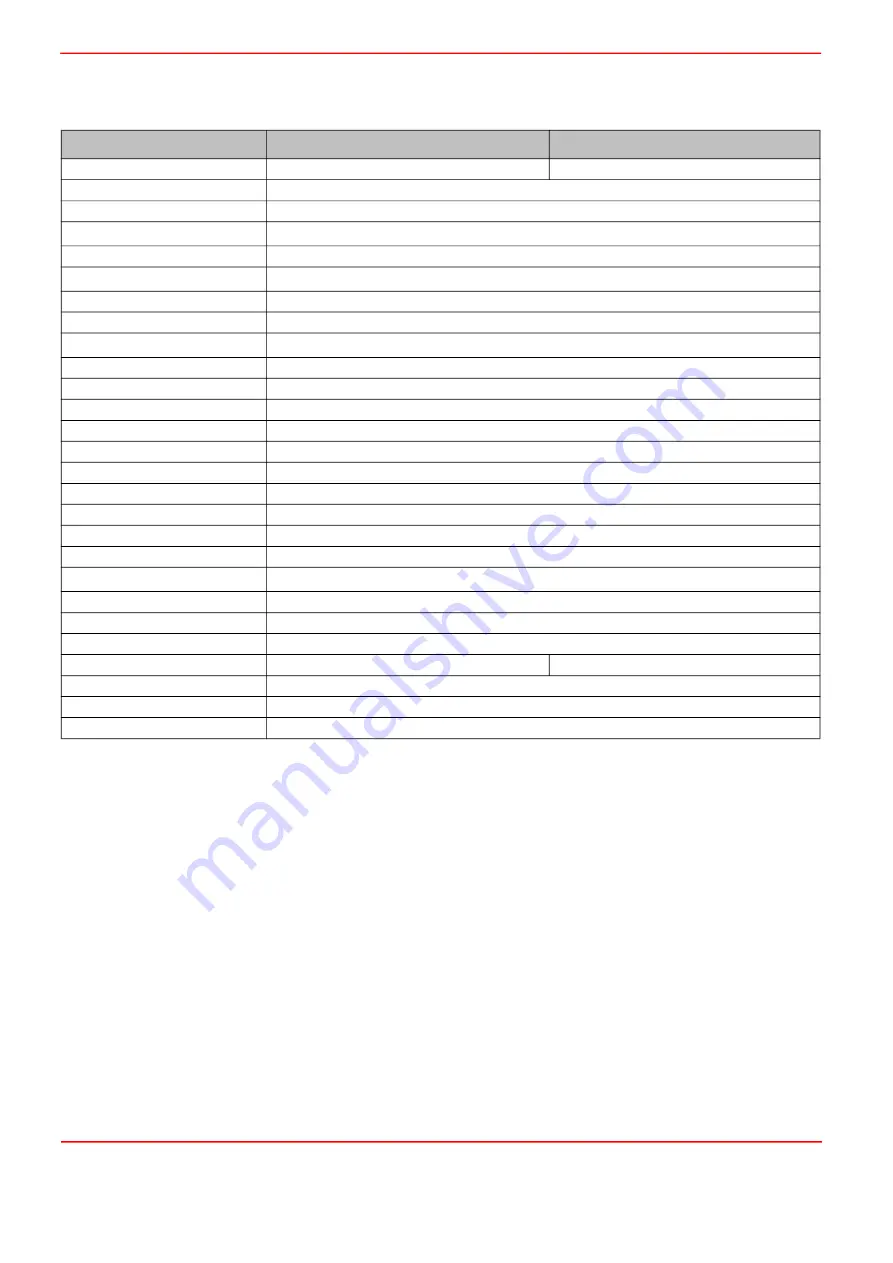
Specification
DRV225
DRV250
Travel Range
25 mm
50 mm
Unidirectional Repeatability
±1.6 µm
Bidirectional Repeatability
±3.9 µm
Maximum Pushing Force
a
180 N
Max Velocity
50 mm/s
Max Acceleration
50 mm/s
2
Limit Switches
Hall Effect
Homing Repeatability
±3.6 µm
Feedback
None
b
Motor Type
2-Phase Stepper Motor
Full Step Angle
1.8°
Lead Screw Pitch
1.0 mm
Microsteps per Revolution
409,600
Motor Phase
2
Rated Voltage
4.6 V
Rated Current per Phase
0.85 A
Resistance per Phase
3.6 Ohms
Inductance / Phase
4.6 mH
Holding Torque
0.2 N•m
Rotor Inertia
24 x 10
-7
kg•m
2
Insulation
Class B
Operating Temperature Range
5 to 40 °C
Humidity Range
Less than 80% RH (non-condensing) at 31°C
Actuator Mass
0.58 kg
0.66 kg
Cable Length
0.5 m
Connector Type
D-sub DE 15 Pin Male
Compatible Controllers
BSC201, BSC202, BSC203, MST602





















































