


























Technosoft 2019
36
iPOS360x VX-CAN/CAT Technical Reference
3.7.11 Disable of Autorun Mode (for CAN) / Disable Setup (for CAT)
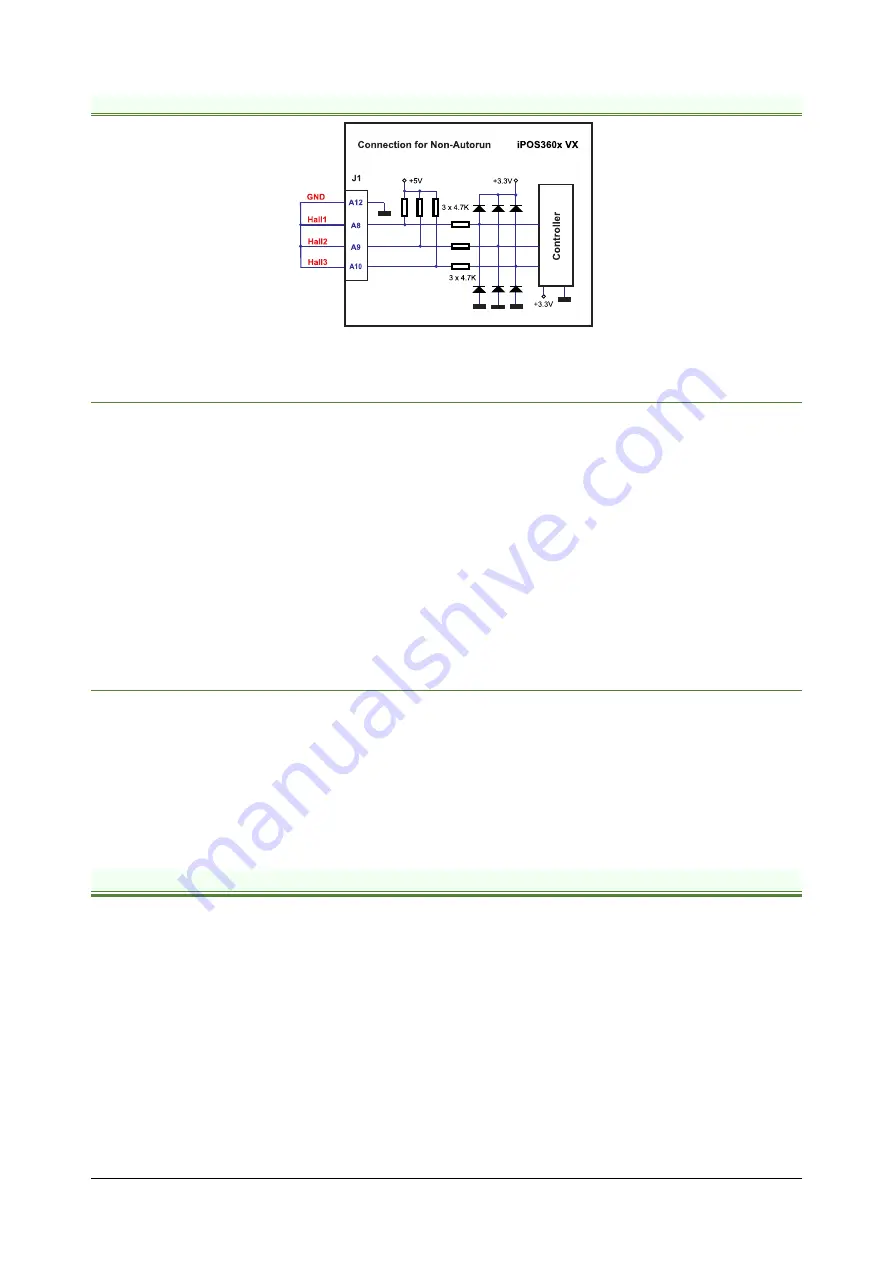
Figure 3.32.
Temporary
c
onnection during power-on to disable the drive from Autorun mode
3.7.11.1 For CAN drives
When the iPOS360x is configured for TMLCAN communication protocol, the default operation mode is
Autorun
. If a
TML program is present in the EEPROM of the drive, the iPOS360x will start its execution.
In case the TML program becomes corrupted, i.e. due to strong electromagnetic fields, the
Autorun
mode can be
disabled by:
a) Software: writing the value
1
in the first EEPROM location (address 0x4000). You can use the
Command
Interpreter
from EasySetUp / EasyMotion Studio to execute the following instructions:
var_i1 = 0x4000; (var_i1), spi = 1;
b) Hardware: connecting all digital Hall inputs to GND, as shown in
. This option is particularly useful
when you are unable to establish communication with the drive.
After the drive is set in
slave / non-Autorun
mode using the second method, the first one may be used to disable the
TML application from the EEPROM. On next power on the drive will enter in the
slave / non-Autorun
mode independently
of the digital Hall inputs status
3.7.11.2 For EtherCAT drives
In some very rare cases, the setup table might be corrupted, leading to a loop where the drive resets continuously.
This behavior can be noticed by seeing both the Ready and Error LED blinking for short periods of time continuously.
To recover from this behavior, the setup table can be invalidated by connecting all digital Hall inputs to GND, as
shown in
On the next power on, the drive will load setup default settings and the Motion Error Register (MER) bit 2 will be 1. After
a new valid setup table is loaded onto the drive, disconnect the hall sensors from GND and execute a new power off/
power on cycle.
3.8
Operation Mode and Axis ID Selection for CAT drives
For EtherCAT (CAT) drives, the Operation mode is always CoE protocol and cannot be changed.
The Axis ID selection can only be done by software setting, with Easy Motion Studio or Easy Setup.
The iPOS360x VX-CAT drives support all EtherCAT standard addressing modes. In case of device addressing mode
based on node address, the iPOS drive sets the configured station alias address with its Axis ID value. The drive Axis
ID value is set after power on only by software when setting via EasySetUp a specific Axis ID value in the range 1-255.
The hardware Axis ID pins from the CAN version are used to communicate with the ECAT-VX adapter.
The default Axis ID will be 255.
If the axis ID is selected as H/W in Setup, the axis ID will be 255.
If the Axis ID is 255, then the ECAT “configured station alias” will be 0. This setting allows certain EtherCAT masters to
have multiple drives in a network having the same station alias (0).
If the Axis ID is set between 1 and 254, the “configured station alias” will be set accordingly.
Remark:
Some EtherCAT masters consider having the same station alias (with non-zero values) on multiple drives as
an Error.