



















2
M1.5*5 Self-tapping Screw
10
M1.4*8 Screw
6
M2*8 Screw
12
M3*5 Screw
18
M3*8 Countersunk Screw
8
M1.4 Nut
6
M2 Nut
12
M3
Self-locking
Nut
8
M3*8 Bi-pass
Copper
Standoff
4
M3*25 Bi-pass
Copper
Standoff
4
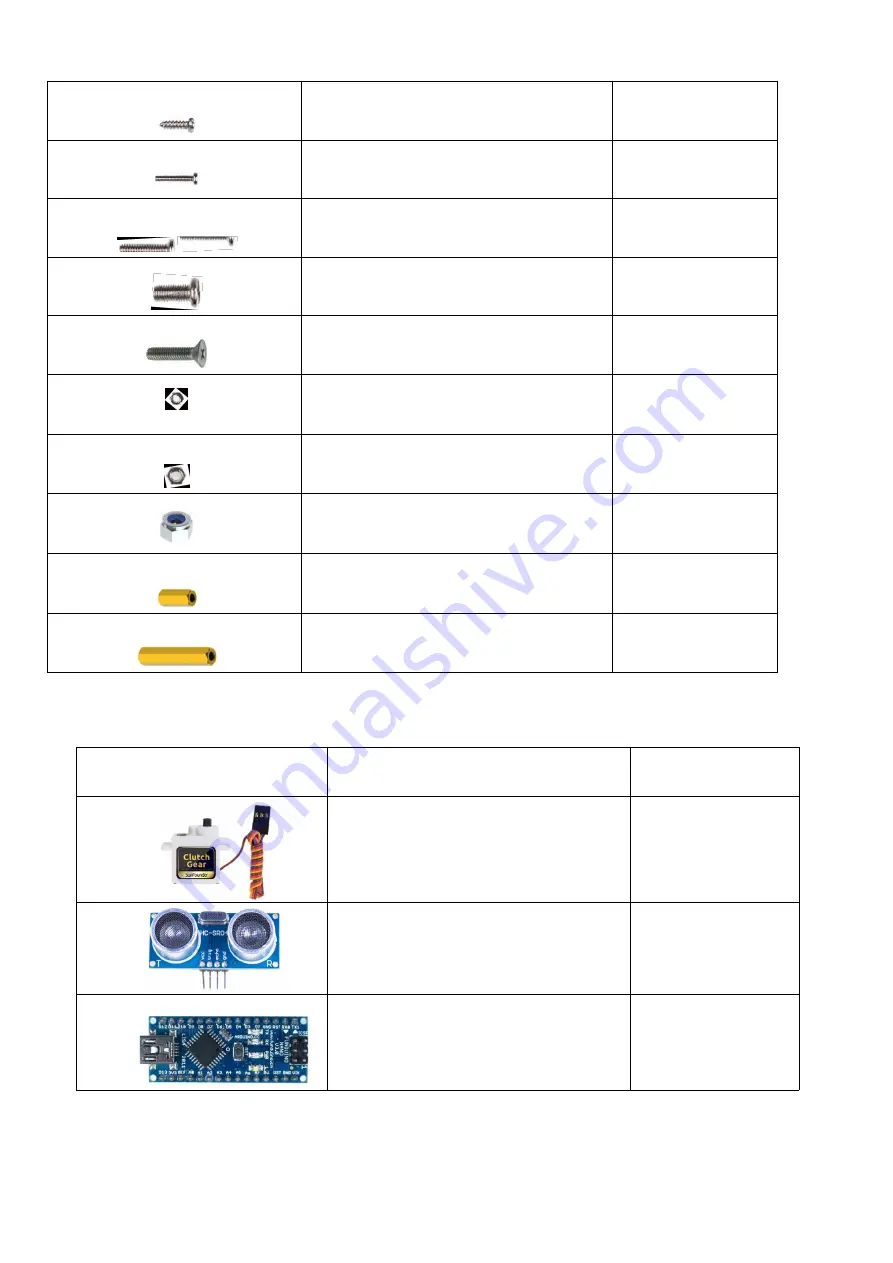
iii.
Electrical Components
Parts
Name
Qty.
SF006C Servo
4
Ultrasonic Module
1
SunFounder Nano Board
1







































































