



Page: 4
A "Declaration of Conformity" in accordance with the above standards has been made and is
filed at Softing Industrial Automation GmbH, Germany.
NOTE:
•
To satisfy the EMC requirements, the equipment used (PC, monitor, CAN stations, etc.)
also has to meet the EMC requirements. A shielded cable must be used. In addition, the
cable shield must be grounded properly.
6 Alternative Physical Layer
CAN-PRO2-PCIE is equipped with CAN High Speed transceivers according to ISO11898-2. It is
possible to alter the physical layer by add-on hardware. By default jumpers are plugged in the add-on
socket that supply the CAN controller signals Tx and Rx to the default transceiver chips.
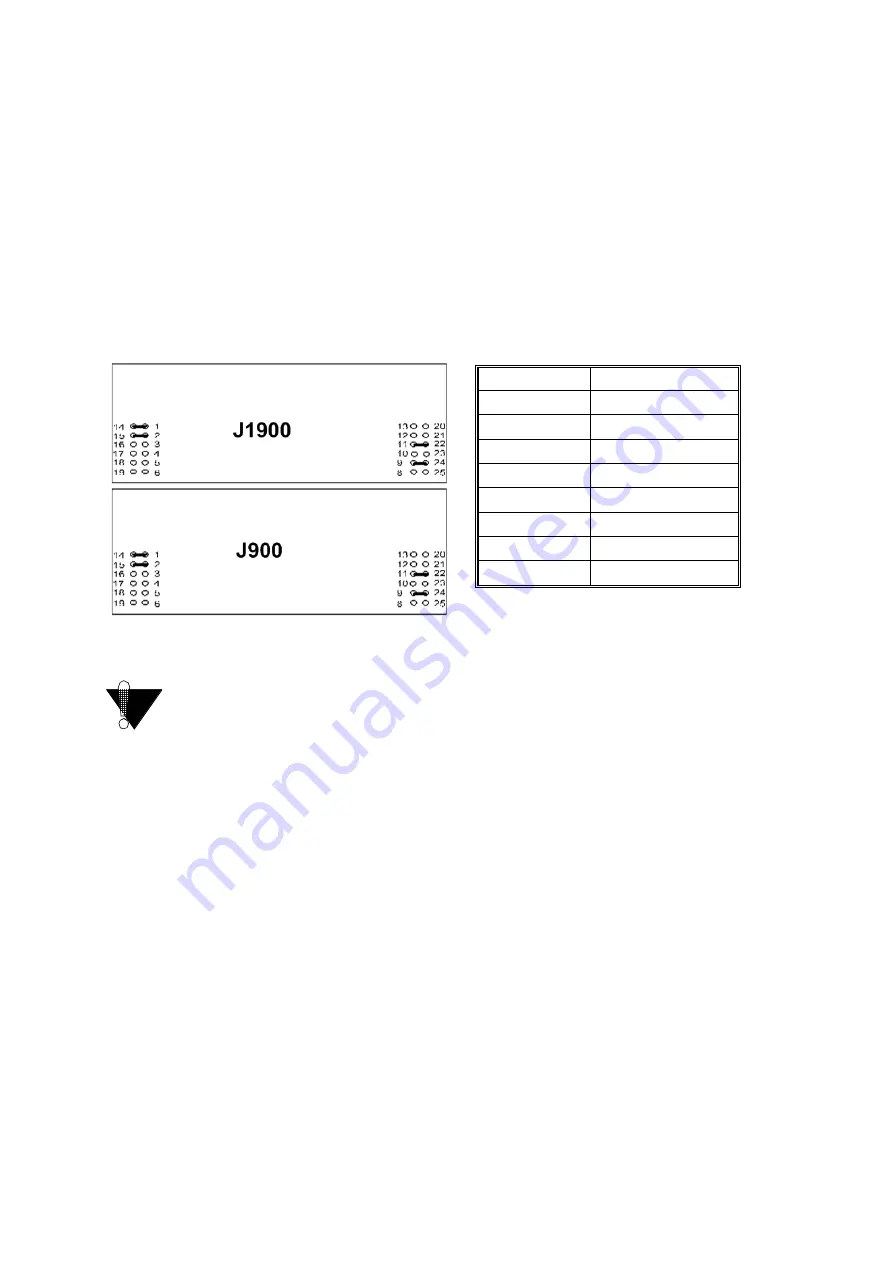
This default jumper setting is shown below.
If you like to plug a different physical layer module, remove the jumpers of the channel(s) to
be used.
Softing offers various alternative physical layer modules. Please contact Softing Automotive
sales for more information about available modules and details about signaling.
7 Technical
data
•
Unit:
PCI Express card, acc. to PCIe specifications r1.0a and CEM 1.1
•
CPU:
XC161, 40 MHz with internal TwinCAN CAN controller
•
Memory:
256 kbytes XC161 on-chip Flash, 512 kbytes RAM,
•
PC interface:
PCI Express, single lane, 512 kbytes shared RAM
•
PC interrupt:
controlled by the operating system
•
CAN interface:
galvanically isolated (1kV) CAN high speed according to
ISO
11898-2
•
CAN connector:
2 Sub-D 9 pin male, pin assignment acc. to CiA DS102
•
Baud rate:
3.125 kbit/s up to 1 Mbit/s
•
Power supply:
+12V (
±
5%); typ. 90 mA
+3.3V
(
±
5%); typ. 500 mA
•
Temperature range:
Operation:
0°C … 70°C (board ambient, i.e. inside the PC)
0°C … 55°C (typ. PC ambient)
Storage:
-20°C … 70°C
•
Relative humidity
< 90% (non-condensing)
Jumper Signal
J1900.1-14
CAN_H channel 2
J1900.2-15
CAN_L channel 2
J1900.11-22
Rx0 channel 2
J1900.9-24
Tx0 channel 2
J900.1-14
CAN_H channel 1
J900.2-15
CAN_L channel 1
J900.11-22
Rx0 channel 1
J900.9-24
Tx0 channel 1
NOTE:
Don’t change the jumper settings if you run the interface in the default CAN High
Speed environment. Changes may lead to malfunctions or destruction of the board.





















































