




















6 / 25
Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
The depth camera on the top of the Apollo, with a visual angle 45°x35° and a
visual range 1.3m, makes Apollo can detect the obstacles above the Lidar layer
and send command out to avoid them.
Cliff Sensor
There are 3 cliff sensors in the front bottom edge of Apollo. The minimum
detected depth is 5cm. When Apollo walks to an edge of a step, the cliff sensor
can detect the step and send signals out to request the change of the robot
direction. Therefore, the robot can avoide falling down from a higher place and
move freely.
All the above sensors ensure the high perpormance of Apollo path planning,
navigation and obstacle avoidance when it walking in varies complicated
environments.
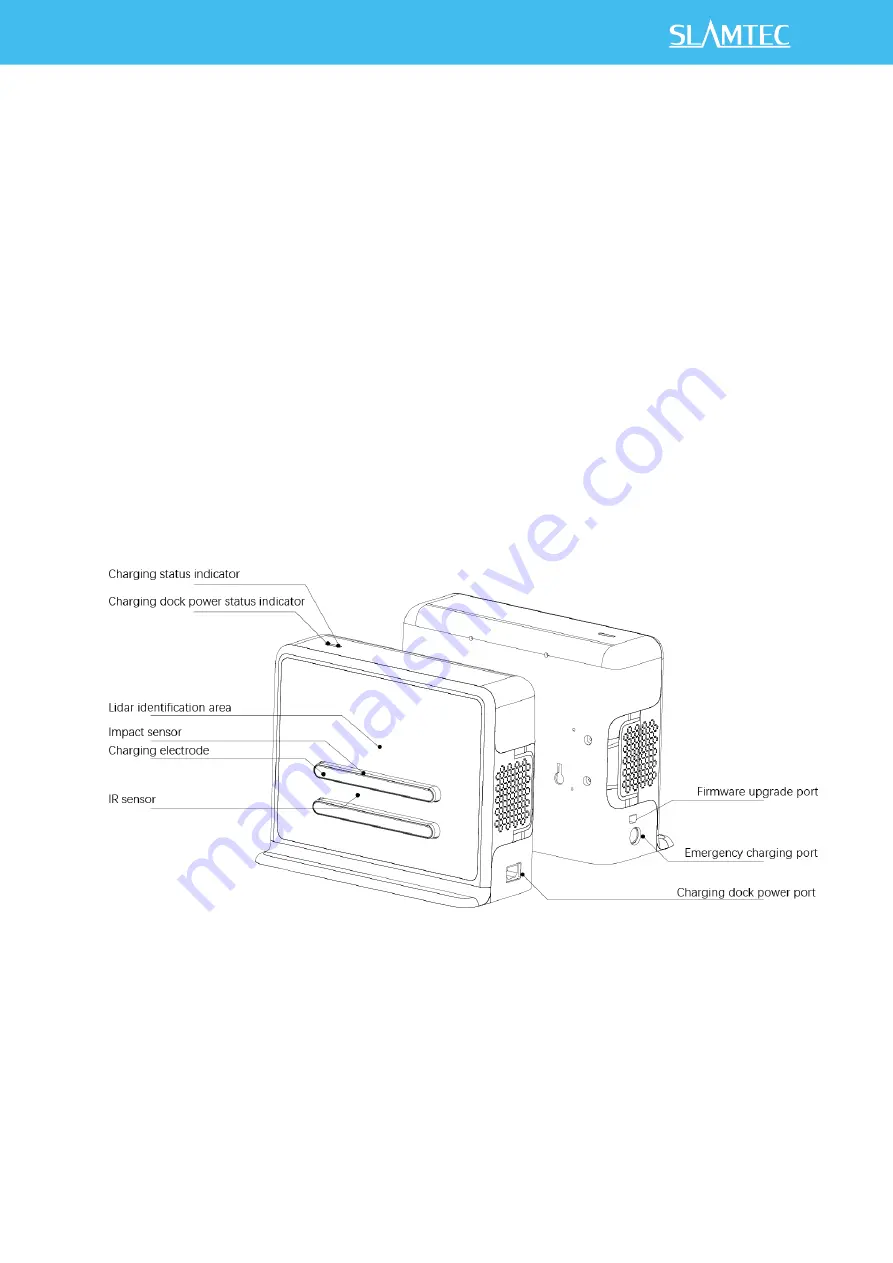
Charger
Figure 2-2 Apollo Charger
Apollo has a charger that supports autonomous recharging. After Apollo sending
out a recharging command, Apollo will go back to the charger and charge itself
automatically.







































































