





























Maintenance
20221586B
99
4.
When the calibration is completed, (after having made
approximately 1 1/4 turns), it will be confirmed by the display
reading “Confirmed”.
Compass deviation
The heading from a magnetic heading sensor will normally have
a deviation when compared with the actual direction of the
earth’s magnetic field. This is caused by interference from the
boat’s local magnetic field. The deviation will be at a minimum
if the compass is placed as far as possible from any magnetic
object on board. On the other hand, you may have to
compromise with other requirements for the installation of the
compass (page 65).
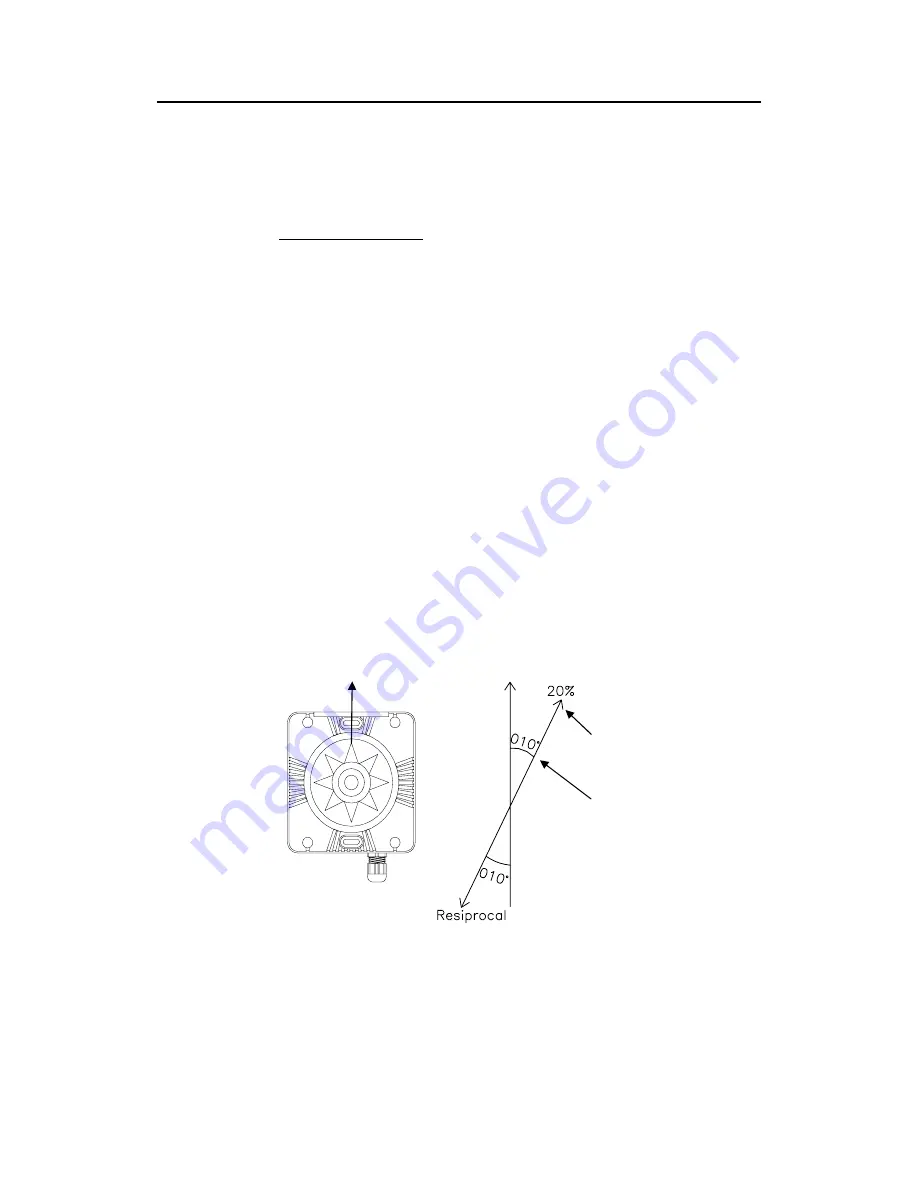
During the calibration, the compass will measure the magnitude
and direction of the local magnetic field from where the compass
is mounted. The magnitude is given in % of the magnitude of the
earth’s magnetic field. If the local magnetic field is stronger than
the earth’s magnetic field (the local field is reading more than
100%), the compass calibration will fail. If the local field is
reading more than 30%, you should look for any interfering
magnetic objects and remove them, or you should move the
compass to a different location. The local field angle will aid you
to the local interfering magnetic object. See drawing.
Lubber line
Lubber line
Magnitude of local
field in % of
earth’s magnetic
field.
Direction of local
field with respect
to lubber line. It
can also be on the
reciprocal.
Note !
In certain areas and at high latitudes the local magnetic
interference becomes more significant and heading errors
exceeding ±3° may have to be accepted.
Содержание AP26
Страница 1: ...MANUAL Simrad AP26 and AP27 Autopilots ...
Страница 2: ...This page is intentionally left blank ...
Страница 38: ...Simrad AP26 and AP27 Autopilots 36 20221586B 1 2 4 3 7 5 6 8 Figure 2 3 ...
Страница 84: ...Simrad AP26 and AP27 Autopilots 82 20221586B This page is intentionally left blank ...
Страница 152: ...Simrad AP26 and AP27 Autopilots 150 20221586B This page is intentionally left blank ...







































































