














Содержание AP26
Страница 1: ...MANUAL Simrad AP26 and AP27 Autopilots ...
Страница 2: ...This page is intentionally left blank ...
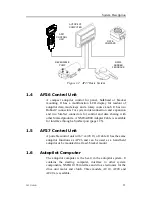
Страница 38: ...Simrad AP26 and AP27 Autopilots 36 20221586B 1 2 4 3 7 5 6 8 Figure 2 3 ...
Страница 84: ...Simrad AP26 and AP27 Autopilots 82 20221586B This page is intentionally left blank ...
Страница 152: ...Simrad AP26 and AP27 Autopilots 150 20221586B This page is intentionally left blank ...







































































