




























Function blocks
3
3.1
Overview of function blocks
This section contains a description of all of the function blocks (FBs) and the data structure
you need for communication between a SIMOTION hardware platform and the SIMODRIVE
POSMO A.
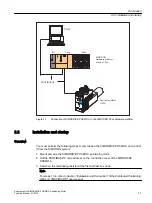
The function blocks form the software interface between the SIMOTION system and the
SIMODRIVE POSMO A positioning motor.
These function blocks make it easier to control and assign parameters for a SIMODRIVE
POSMO A positioning motor from the SIMOTION program.
For example, you can assign parameters for a POSMO A without being familiar with
PROFIBUS parameter formats and request specifiers.
The function blocks must be called repeatedly (in cycles) from the user program.
The following function blocks are available:
● Function block _POSMOA_control (Page 17)
● Function block _POSMOA_nControl (Page 24) (V4.1 and higher):
● Function block _POSMOA_rwParameter (Page 29)
● Function block _POSMOA_rwAllParameter (Page 32)
Note
For the complete control and communication of the SIMODRIVE POSMO A from the
SIMOTION program, an instance must be created for each _POSMOA_rwParameter and
_POSMOA_rwAllParameter function block and, depending on the parameterized operating
mode (speed or position control mode), an instance of the _POSMOA_control or
_POSMOA_nControl function block.
Note
If the SIMODRIVE POSMO A is disconnected and then reconnected to the power system, any
MDI traversing block data (see the table titled "Parameters of the _POSMOA_control function
block") that had been transferred previously must be transferred to the POSMO A again.
3.2
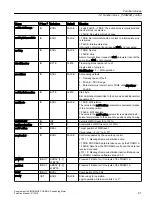
Function block _POSMOA_control
Task
You can control the connected SIMODRIVE POSMO A with the _POSMOA_control function
block.
Supplement to SIMODRIVE POSMO A Positioning Motor
Function Manual, 01/2015
17







































































