14
Annex
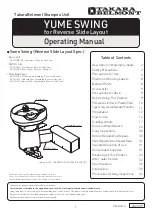
14.1
Teach routine at a glance
Move
Move
Move
MR
PW
R
s
s
s
MR
PW
R
s
s
MR
PW
R
f
f
MR
PW
R
s si
MR
PW
R
s
MR
PW
R
f
MR
PW
R
f
f
Regular Operation
Teach Menu
Dynamic Teach
Enter Teach
Menu
2x
ca.
0.5 sec
(short)
1x
ca.
0.5 sec
(short)
Enter Manual
Teach menu
1x
ca.
1.5 sec
(long)
Start
Dynamic
Teach
1x
ca.
1.5 sec
(long)
Move piston
→
Both end
positions are
set at v = 0 m/s
End
Dynamic
Teach
1x
ca.
1.5 sec
(long)
Start
Manual
Teach*
1x
ca.
0.5 sec
(short)
Switch to 10V end position teach
without setting 0V end position
1x
ca.
0.5 sec
(short)
Leave Menu
1x
ca.
0.5 sec
(short)
Leave Menu
Move pistonto 1st
end position (0V)
(default setting:
-25 mm)
Confirm 0V
end position and
leave Manual Teach
Move pistonto 2nd
end position (10V)
(default setting:
+25 mm)
1x
ca.
1.5 sec
(long)
1x
ca.
1.5 sec
(long)
1st end position
2nd end position
Confirm 10V
end position and
leave Manual Teach
No end position found?
→ Exit teach menu
without changes
Manual Teach
No stops found?
→ Exit teach menu
without changes
14
ANNEX
34
O P E R A T I N G I N S T R U C T I O N S | MPS-G with analog output
8025941/2020-07-16 | SICK
Subject to change without notice