





















Operating Instructions
Chapter
5
IVC-3D
8011007
SICK IVP • Industrial Sensors • www.sickivp.com • All rights reserved
33
Hardware description
5
Hardware description
5.1
Measurement setup
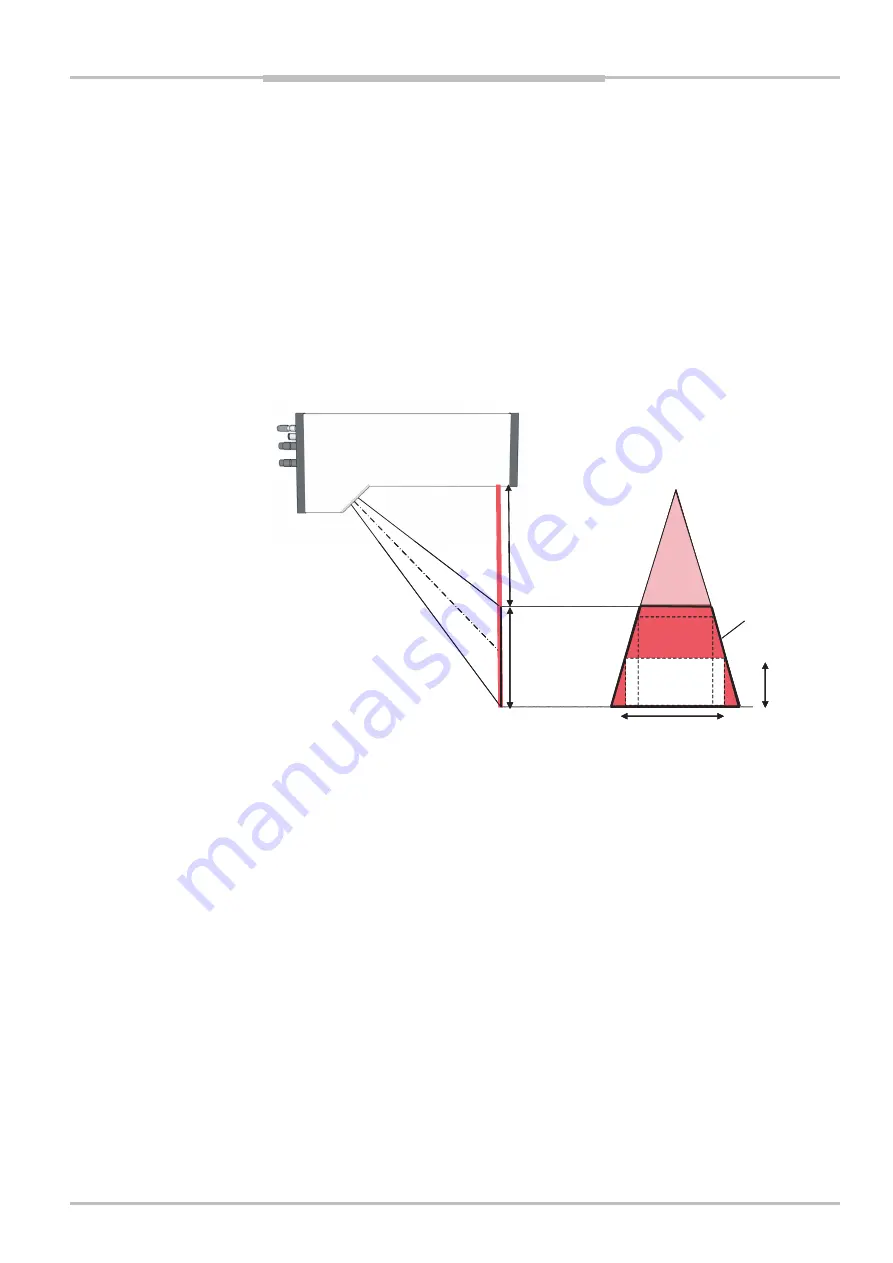
The IVC-3D maximum field-of-view (FOV) is determined by the size of the housing, the lens
system and the laser fan angle. The FOV is placed at a certain distance from the device,
the stand-off, and is a trapezoid shaped area in the laser plane. The maximum height and
the maximum width of an inspected object define a rectangle which must be entirely inside
the trapezoid total FOV.
Figure 5.1 – Explanation of IVC-3D FOV.
The measurement speed is dependent on required resolution in the length (moving)
direction. The device grabs profiles at a rate determined by the settings in the software
tool
Grab setup
. The possible profile speed in a specific application is dependent on the
chosen measurement accuracy and chosen laser strength.
Stand-off
Total height
range
Total FOV
Height
Width







































































