





























26
Manual – MOVIDRIVE® MDX61B Synchronous Operation Board DRS11B
5
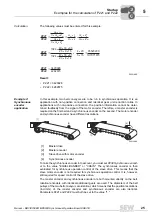
Examples for the calculation of P221 and P222
Startup
For an application with synchronous encoder, the position resolutions of the slave motor
encoder and synchronous encoder have to be adjusted. This is done using parameters
P231 Factor slave encoder
and
P232 Factor slave sync. encoder
.
Data
Slave motor encoder: K47 DT100L4 BM ES1
•
Gear unit reduction ratio:
•
Resolution of incremental encoder (motor encoder):
A
M
= 1024 incr./rev.
The motor encoder supplies 1024 pulses/revolution. The encoder pulses are
quadrupled in the inverter.
•
Belt pulley of the belt conveyor:
d
M
= 200 mm
U
M
=
Π
×
d
M
•
Position resolution of slave motor encoder [incr./mm]:
(A
M
×
i
M
) / (
Π
×
d
M
)
Synchronous encoder:
•
Additional gear:
i
V_S
= 2
•
Resolution of incremental encoder (synchronous encoder):
A
S
= 2048 incr./rev.
The synchronous encoder supplies 2048 pulses/revolution. The encoder pulses are
quadrupled in the inverter.
•
Belt pulley of the synchronous encoder:
d
S
= 150 mm
U
S
=
Π
×
d
S
•
Position resolution of synchronous encoder [incr./mm]:
(A
S
×
i
V_S
) / (
Π
×
d
S
)
Calculation
The following values must be entered for this example:
56586AXX
i
M
=
=
38
x
27
x
69
7.36
23
x
19
x
22
56532AXX
P232
P231
=
=
A
S
x
i
V_S
A
S
x
i
V_S
π
x
d
S
A
M
x
i
M
A
M
x
i
M
d
M
d
S
π
x
d
M
x
P232
P231
=
=
2048
x
2
38
x
27
x
69
200
150
769120
1061910
23
x
19
x
22
1024
x
P232
P231
=
176
243
x
0
0
I
Содержание MOVIDRIVE MDX61B
Страница 2: ...SEW EURODRIVE Driving the world...





















































