8
MOVIDRIVE
®
DFC11A CAN Bus
2
Assembly / Installation
Instructions
01013AEN
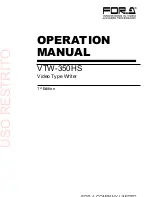
Fig. 4: Assignment of the 9-pin type D CAN-Bus connector
The MOVIDRIVE
®
drive inverter is connected to the CAN bus via the 2-wire bus by a 4-core
shielded cable with twisted-pair signal leads. The 2-wire bus consists of the signal lines CAN High
and CAN Low.
2.4
Shielding and Laying of the Bus Cables
Technically correct shielding of the bus cables absorbs the electrical interference that can occur in
an industrial environment. You will achieve the best shielding results if you adopt the following
measures:
• Hand-tighten the fixing screws of plugs, modules and equipotential bonding conductors.
• Only use plugs with metal or metal-plated housings.
• Connect the shielding in the plug over as large an area as possible.
• Connect the shielding at both ends of the bus cable
• Do not lay signal and bus cables parallel to power cables (motor cables), but wherever possible
in separate cable conduits.
• In an industrial environment use metallic, grounded cable trays.
• Run signal cables and the associated equipotential bonding conductor as close as possible to
each other, using the shortest route.
• Avoid extending bus cables through the use of connectors.
• Run the bus cables close to existing grounded surfaces.
IMPORTANT
In the event of fluctuations in the ground potential, a circulating current may flow through any
shielding which may be connected at both ends and connected to the ground potential (PE). In this
case, ensure there is adequate equipotential bonding in accordance with the relevant DIN VDE
provisions.
6
7
2
3
DGND
CAN High
CAN Low
DGND
5 4 3 2 1
9 8 7 6
E
Q
9-pin type D connector
Twisted-pair
signal cables
Conductive line between
connector housing and screen!