





























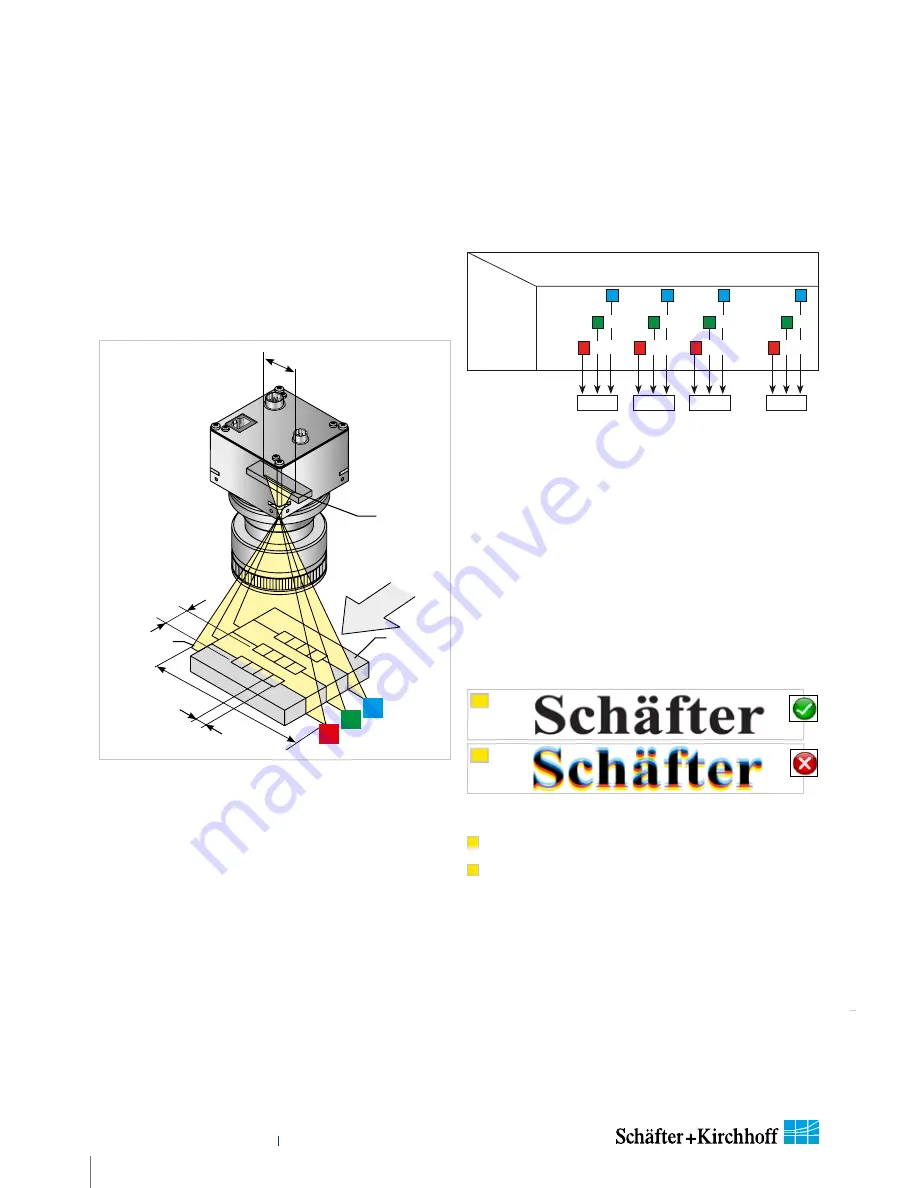
CCD Sensor
Scan
Object
FOV
V
0
W
P
/ ß
W
L
/ ß
Pixel #1
S
Pixel #1
B
G
R
RGB Sensors: 2D Imaging and Pixel Allocation
Camera Contr
ol and Performing a Scan
Camera Control and Performing a Scan
Instruction Manual
SK6288VKOC-4L
shar
ed_CameraContr
ol(3c)_Sync_col-Ext_ML.indd
22
Instruction Manual SK6288VKOC-4L © 2018-04 E
The three lines of the implemented triple line sensor are
sensitive for the primary colors blue (B), green (G) and
red (R). For the spectral sensitivity characteristics, see
section
5 Sensor Information
. The pixel width W
p
is
14 µm and the line spacing W
L
of 112 µm is 8 times the
pixel width.
During object travel, an object point reaches the blue (B)
line sensor first. If the object is transla ted by one pixel
height per clock pulse then after 8 lines the green (G)
pixels are exposed. After another 8 lines then the red (R)
pixels have been covered and all color information has
been acquired.
A
B
Monochrome font pattern
A
line synchronous object transport
B
asynchronous transport of the object
causes color convergence aberration
The Camera SK6288VKOC-4L outputs the blue (B),
green (G) and red (R)-information se quentially in one
single video output signal.
The co lor information originating from the different parts
of the object is stored in the buffer of the PC and subse-
quently reallocated correctly.
Generating the color information of object
locations for display
line scan 17
object location no.
1
2
3
...
2096
RGB RGB RGB ... RGB
PC memory of camera data
column no.
1 2 3 4 5 6 7 8 9 ...
6288
line no.
1
R G B R G B R G B ... R G B
...
9
R G B R G B R G B ... R G B
...
17
R G B R G B R G B ... R G B
...
Triple line sensors require a precise synchronous
translation of the object for the correct allocation of
pixels. Also, the transport direction has to conform to
the sequence of the line acquisition: first blue (B) then
green (G) and red (R).
Images with co lor convergence ab er rations are
generated, when these conditions are not met.
V
O
:
object scan velocity
W
P
:
pixel width = pixel height
H
P
(for sensors with square pixels)
W
L
:
line spacing
S:
sensor length
FOV:
field of view
ß:
magnification =
S / FOV





















































