
























R.T.A. s.r.l. – XPETME05 – 11/20
10/29
4.5 - ENCODER INPUTS AND POWER SUPPLY (C4 Connector, see Fig. 2, 5 and 7)
For each signal the correspondent terminals numbers of connector C4 are indicated:
Pin
Description
RTA cable colors
41
42
43
44
45
46
47
48
+5 V
DC
(Imax = 150 mA)
IN- I.
IN- INDEX.
IN+ I.
IN+ INDEX.
IN- B.
IN- phase B encoder.
IN+ B.
IN+ phase B encoder.
IN- A.
IN- phase A encoder.
IN+ A.
IN+ phase A encoder.
GND
: Negative encoder power supply
Note1
: Negative encoder power supply (terminal 48) is internally connected to 5 and 6 terminals of C1 and
12 terminal of C5.
Note2
: C4 connector must be used to connect encoder of RTA EM / RM series motor
See also software manual for proper motor setting in combination with drive, with reference to setting of
object 0x3210. For different motors with encoder please contact RTA.
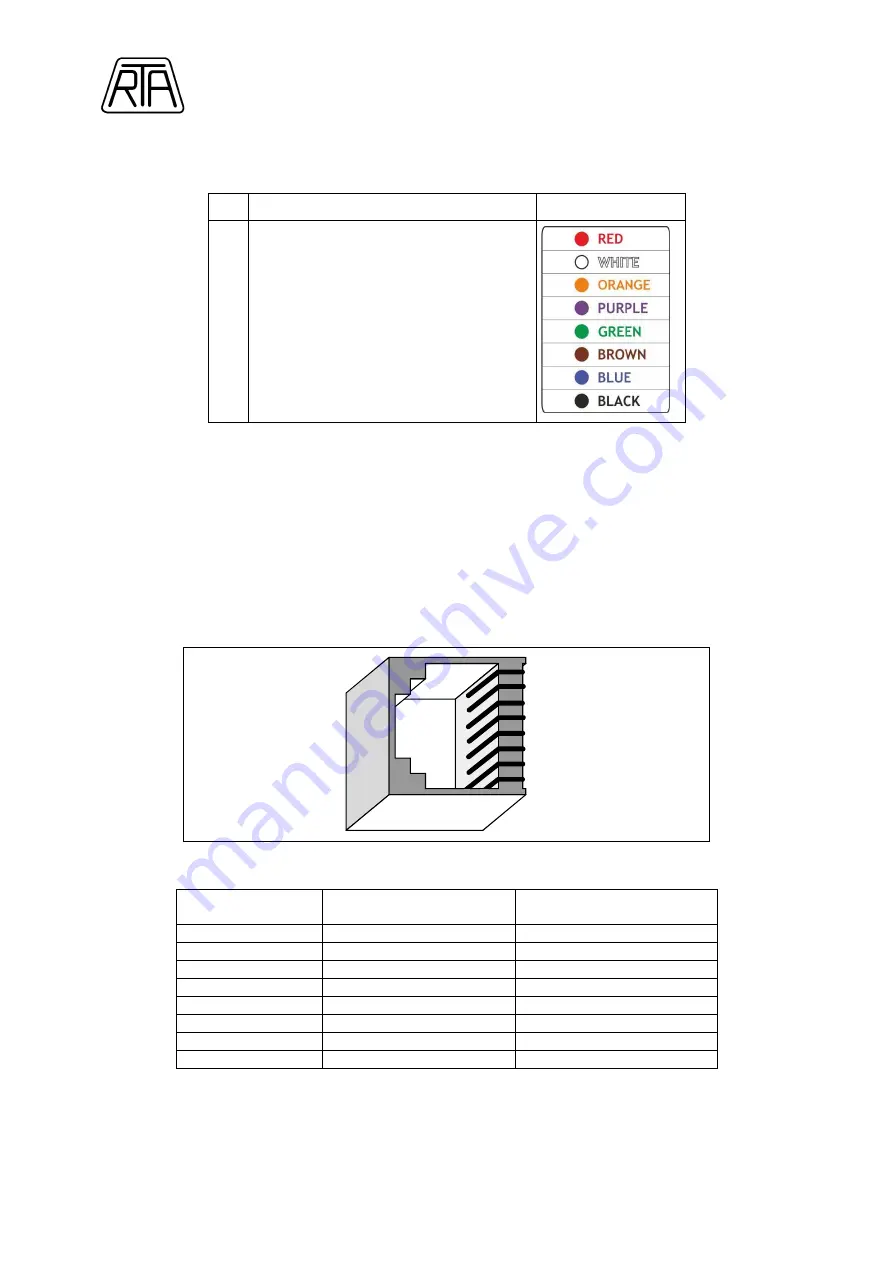
4.6 - RJ-45 CONNECTORS (EtherCAT communication)
Two standard Ethernet RJ-45 modular connectors (IN, OUT) are provided for the EtherCAT communication.
The same pin disposition (same signal) is assigned for both connectors. Figure 4 shows connector RJ-45
used for connection between the drive and the control system.
1
8
Figure 4 – RJ-45 modular connector
Terminal Number
(IN / OUT)
Signal
(Ethernet Connection)
Description
1
TX+
Transmitting s
2
TX-
Transmitting signals -
3
RX+
Receiving s
4
--
75
Ω
Connection
5
--
75
Ω
Connection
6
RX-
Receiving signals-
7
--
75
Ω
Connection
8
--
75
Ω
Connection
Table 1
Connect IN to the higher-level device and OUT to the next slave.
Use twisted-pair cables that satisfy at least “Category 5e” to connect the cable.
When you make cables using exclusive tools, use STP (Shielded twisted pair cable) and RJ-45 modular plug
with shield.







































































