





























Rockwell Automation Publication SYSLIB-RM044D-EN-P - February 2017
47
PowerFlex 753 Drive (P_PF753)
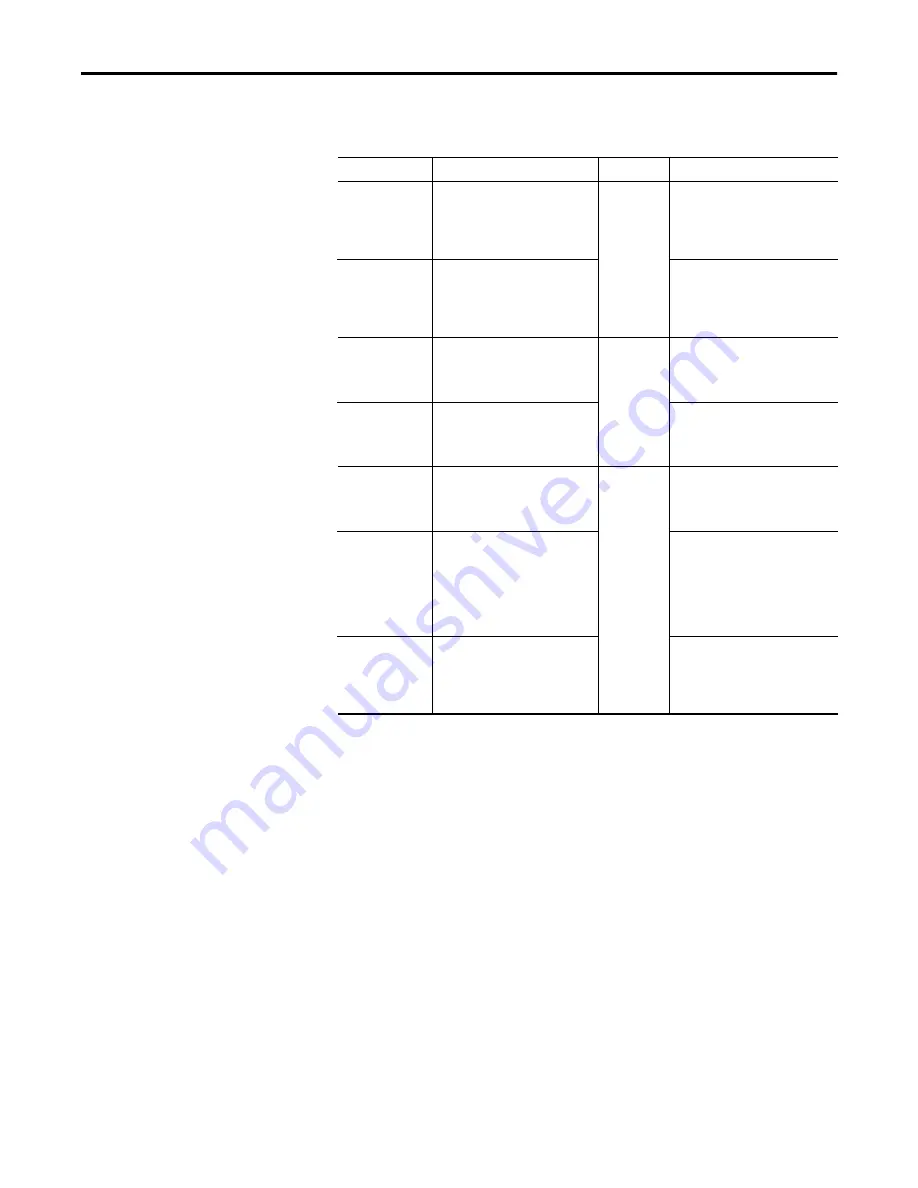
The following table shows the functions on Page 2 of the Maintenance tab.
Table 16 - Maintenance Tab Page 2 Description
Function
Action
Security
Configuration Parameters
Bumpless Program/
Operator Transition
Check to have program settings, such
as Speed Reference, track operator
settings in Operator mode, and have
operator settings track Program
Settings in Program mode.
Equipment
Maintenance
(Code C)
Cfg_SetTrack
Bumpless
Transition from
Override/Hand to
Program/Operator
Check to have the Program and
Operator Speed Reference track the
Override Speed Reference in Override
mode or the actual speed in Hand
mode.
Cfg_SetTrackOvrdHand
Time to pulse
Out_Reset to clear
drive fault
(seconds)
Type the amount of time to hold the
fault reset output true to reset a drive
fault when a reset command is
received.
Configuration
& Tuning
Maintenance
(Code D)
Cfg_ResetPulseT
Time after 'Start' for
Feedback before
Fault (seconds)
Type the amount of time for the
drive’s run feedback to confirm the
drive has started before raising a Fail
to Start alarm.
Cfg_FailToStartT
Time after 'Stop' for
Feedback before
Fault (seconds)
Type the amount of time for the
drive’s run feedback to confirm the
drive has stopped before raising a Fail
to Stop alarm.
Configuration
& Tuning
Maintenance
(Code D)
Cfg_FailToStopT
Maximum jog time
(seconds) 0 =
unlimited
Type the maximum time (in seconds)
that the drive can be jogged by using
OCmd_Jog.
IMPORTANT:
This value stops drive
jogging if HMI communication is lost
during a jog.
Cfg_MaxJogT
Speed Reference
Limits (Minimum
and Maximum)
Type the clamping limits for the
speed reference. If a speed reference
outside this range is entered, the
speed is clamped at these limits and
Sts_SpeedLimited is asserted.
•
Cfg_MaxSpdRef
•
Cfg_MinSpdRef
Содержание PowerFlex 753
Страница 4: ...4 Rockwell Automation Publication SYSLIB RM044D EN P February 2017 Table of Contents Notes ...
Страница 63: ......







































































