





























82
Rockwell Automation Publication 2198-UM001D-EN-P - May 2014
Chapter 5
Connecting the Kinetix 5500 Drive System
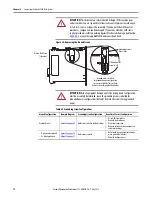
Motor Brake Connections
Figure 47 - BC Connector Wiring
Table 39 - Motor Brake (BC) Connector Specifications
MBRK-
MBRK+
2
1
Motor Cable
Shield Clamp
Motor Brake (BC) Connector Plug
Kinetix 5500 Servo Drive
(front view)
Drive Cat. No.
Pin
Signal/
Wire Color
Recommended
Wire Size
(AWG)
Strip Length
mm (in.)
Torque Value
N•m (lb•in)
2198-H
xxx
-ERS
x
BC-1
MBRK+/Black
N/A
(1)
(1) Motor brake wires are part of the 2090-CSBM1DF-
xx
AA
xx
motor cable.
7.0 (0.28)
0.22…0.25
(1.9…2.2)
BC-2
MBRK-/White
Содержание Allen-Bradley 2198-CAPMOD-1300
Страница 28: ...28 Rockwell Automation Publication 2198 UM001D EN P May 2014 Chapter 1 Start Notes ...
Страница 202: ...202 Rockwell Automation Publication 2198 UM001D EN P May 2014 Appendix A Interconnect Diagrams Notes ...
Страница 212: ...212 Rockwell Automation Publication 2198 UM001D EN P May 2014 Appendix B Upgrade the Drive Firmware Notes ...
Страница 228: ...228 Rockwell Automation Publication 2198 UM001D EN P May 2014 Appendix D Induction Motor Support Notes ...
Страница 234: ...234 Rockwell Automation Publication 2198 UM001D EN P May 2014 Appendix E EC Certifications Notes ...
Страница 243: ......







































































