



























16
IV. Intelligent Battery
The intelligent battery (model: TB47S) is the smart flight battery used by DJI’s Matrice 600 drone. Its
capacity is 4500 mAh with a voltage of 22.2 V. It also comes with the charging and discharging function.
This battery adopts high-energy battery cells and uses an advanced battery management system to power the
robot. Always use the RoboMaster official charger to charge the robot Please read the “M600 -Series
Intelligent Flight Battery User Safety Guidelines v1.0” in detail before use.
4.1
Powering On/Off
To switch the intelligent battery on or off, short-press the power switch once and then press and hold the power switch
for more than two seconds. When the battery is on, the capacity indicator shows the current battery capacity. When
the battery is off, the indicator is off.
4.2
Checking Battery Level
To view the current capacity, short-press the power switch once when the battery is off.
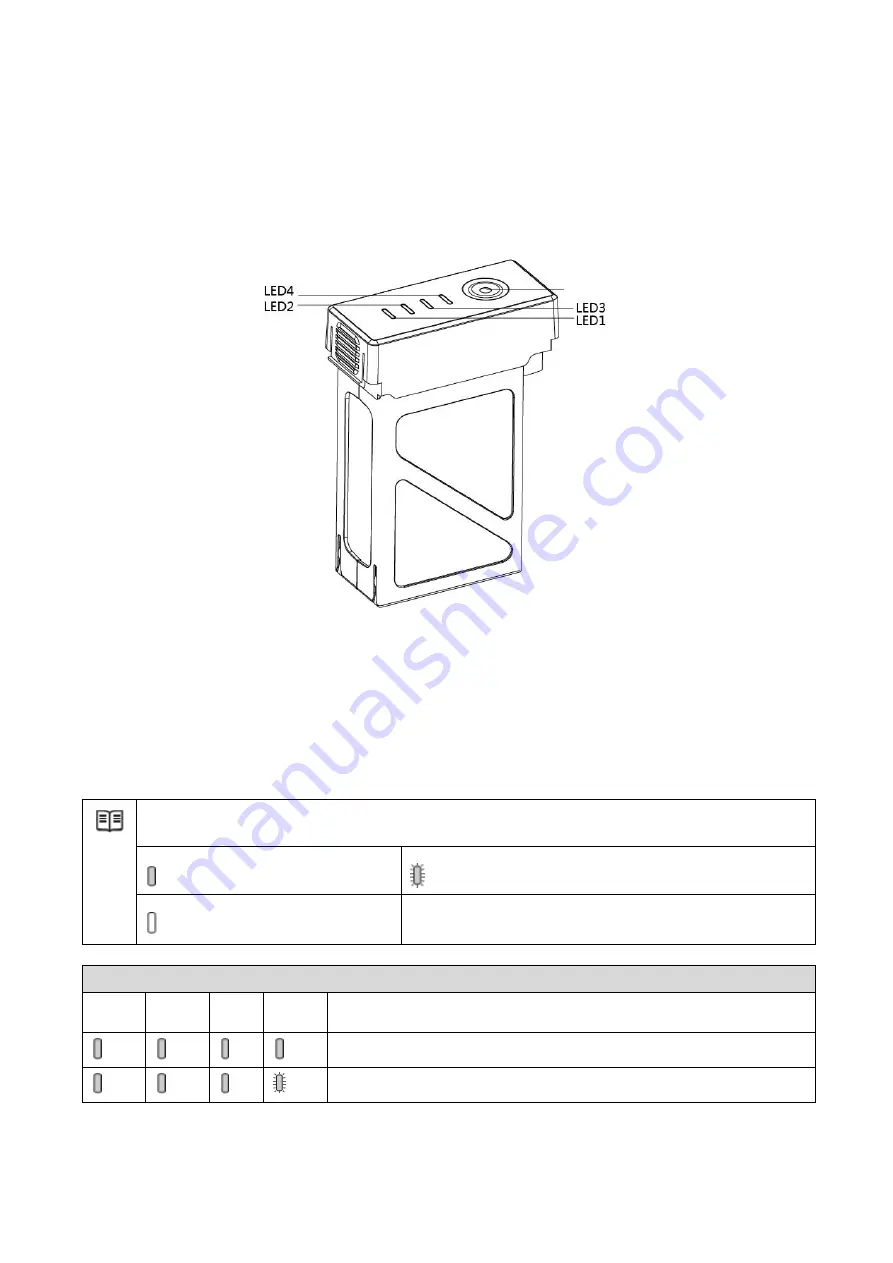
The capacity indicator displays the power and life of the flight battery during charging and discharging.
The statuses of the indicator are defined as follows:
indicates that the LED indicator is on
indicates that the LED indicator is flashing
indicates that the LED indicator is
off
Battery Level LEDs
LED1
LED2
LED3
LED4
Current
capacity
87.5%-100%
75%-87.5%
POWER BUTTON






























































