




























PL
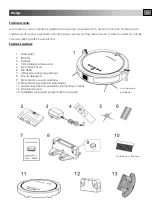
Możliwe jest ładowanie baterii za pośrednictwem stacji dokującej, patrz rysunek powyżej.
Krok 1: Włącznik zasilania wirtualnej ściany musi znajdować się w pozycji “ON”.
Krok 2: Naciśnij i przesuń przełącznik wtyczki zasilania w stacji dokującej.
Krok 3: Podłącz wtyczkę zasilającą do gniazda zasilającego w wirtualnej ścianie, dioda LED
w wirtualnej ścianie zacznie migać.
Krok 4: Gdy bateria wirtualnej ściany jest w pełni naładowana dioda LED świeci stale.
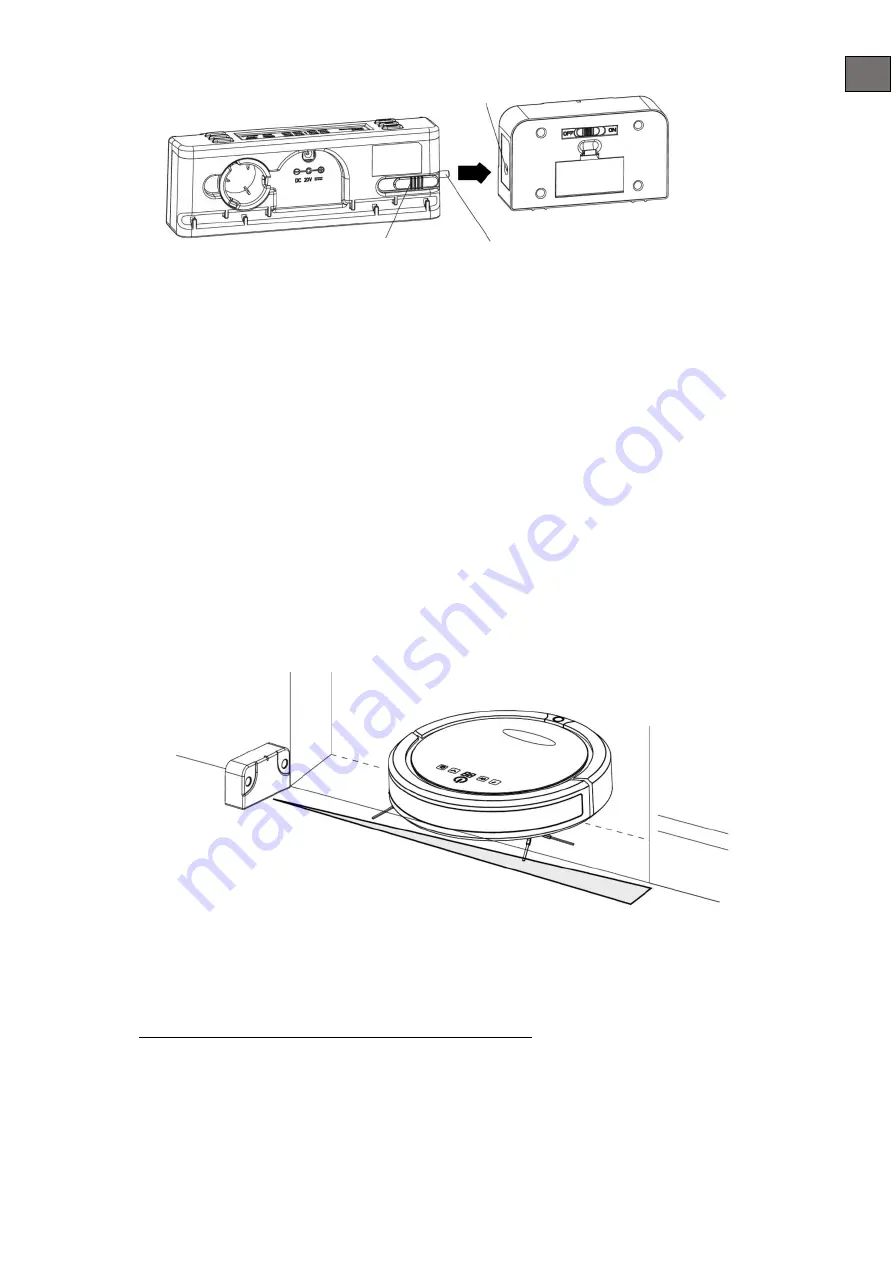
W trakcie pracy robota wirtualna ściana musi znajdować się w odległości co najmniej 3
metrów od podstawy ładowania. Należy unikać kierowania sygnału wirtualnej ściany w stronę
stacji dokującej.
Po zakończeniu cyklu sprzątania przez robota należy wyłączyć wirtualną ścianę przesuwając
przełącznik zasilania w pozycję “OFF”.
Robot w momencie wykrycia bariery ustanowionej przez wirtualną ścianę
zmieni kierunek poruszania się.
Parowanie Robota z ultradźwiękową wirtualną ścianą:
1.
włącz urządzenie /robot powinien być odsunięty stacji dokującej/,
2.
włącz wirtualną ścianę,
3.
dotknij i przytrzymaj przycisk lamy UV aż robot wyda dwukrotnie sygnał dźwiękowy,
4.
wąskim przedmiotem wciśnij i przytrzymaj przycisk znajdujący się z tyłu wirtualnej ściany do
momentu aż robot wyda sygnał dźwiękowy.
Stacja dokująca
Wirtualna ściana
Gniazdo zasilania
Wtyczka zasilania
Przełącznik
Stacja dokująca
Wirtualna ściana
Gniazdo zasilania
Wtyczka zasilania
Содержание Air AH-157
Страница 5: ...EN TOP BOTTOM Features ...
Страница 27: ...EN Useful Tips ...
Страница 28: ...EN ...
Страница 63: ......
Страница 64: ...RoboJet www robojet tech ...






































































