




























14 |
P a g e
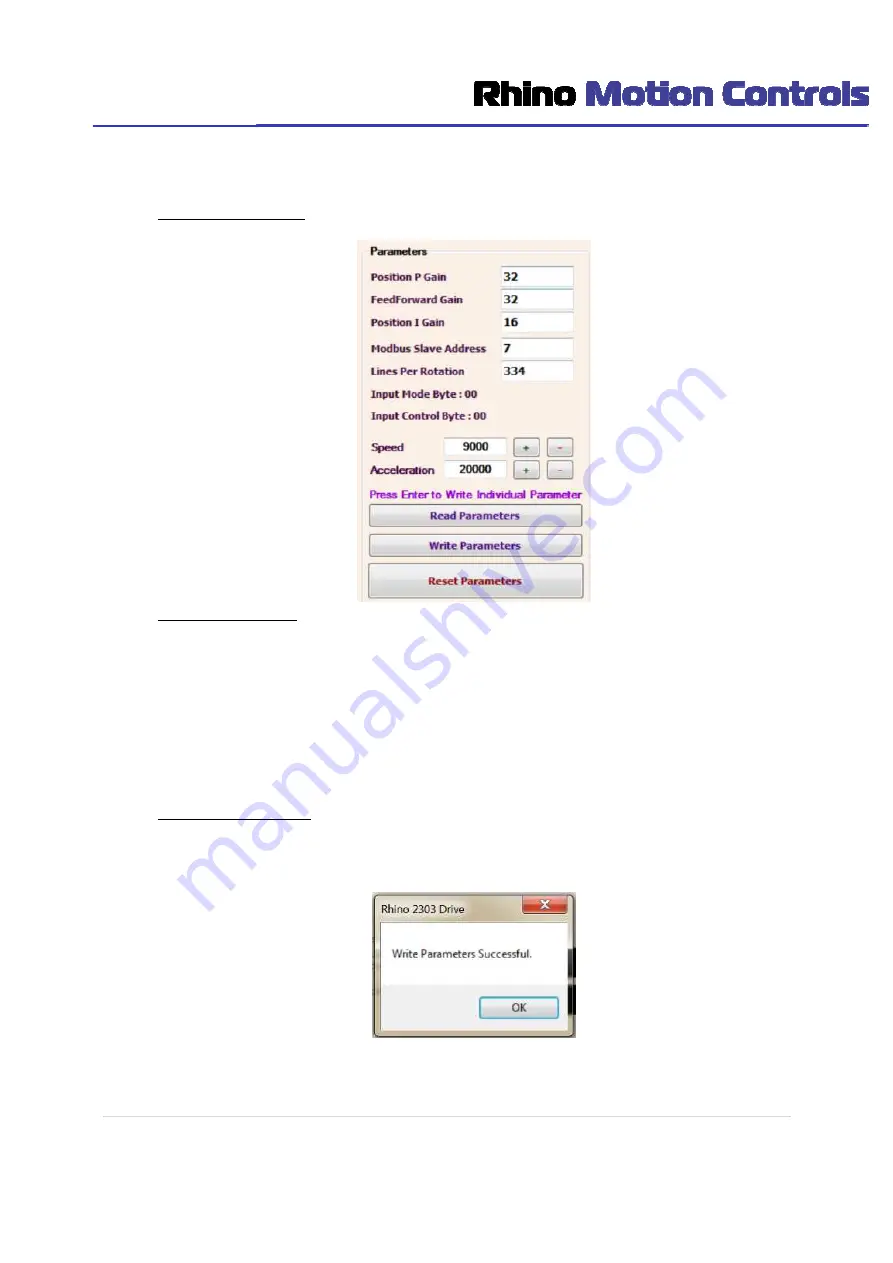
Parameters
READ PARAMETERS
"
Read Parameters
" is used to read current parameters of drive.
SET A PARAMETER
•
Pressing 'Enter' on text box will change the parameter in drive but it will not be saved permanently.
'Write Parameters' button must be clicked to save all parameters permanently.
•
Set Position Proportional gain, Velocity Feed Forward gain and Position Integral Gain as per
requirement. These can be used to remove vibrations and making movement of motor accurate.
•
Set Modbus slave address and lines per rotation. Lines Per Rotation is very important because it does
have effect on indication of speed feedback.
•
If slave address is changed the software will automatically change the slave id of currently connected
device.
•
Set Speed and Acceleration as per the requirement of application.
WRITE PARAMETERS
Once all the parameters are entered and tested, click on "
Write Parameters
" to save all parameters in drive.
These parameters will be changed permanently. Notification will be shown as below when all parameters
are written successfully.