



























18
• When you have familiarised yourself a little with the model's flight properties, you may perform additional exercises.
Start with simple flight manoeuvres like a flying a meter forwards/back (nod function). Then practice hovering to the
left/right (roll function). When you have the practice you need, start flying circles and figure eights.
• If you want to terminate flying, the rotors must be switched off first after landing. Then put the model's on/off switch
to the "OFF" position. Only then must the transmitter be switched off.
b) Automatic Starting and Landing by Pushing a Button
Attention!
Automatic starting of the model requires an accessible starting position in all directions. This function
therefore can only be used in large rooms/halls or outdoors. Persons and objects must be at least 5 metres
away from the starting position. When not observing this, there is a danger of damage to the model or other
objects nearby and a danger of injury to persons/animals in the vicinity!
Automatic landing is a firmly programmed process. The prerequisite for safe automated landing is that
the model is in a stable flight condition (hovering) before the respective operating button is pushed at the
transmitter, the flight height ideally does not exceed 1.5 metres and the landing point is at least 5 metres
away from obstacles and persons.
When not observing this, there is a danger of damage to the model or other objects nearby and a danger
of injury to persons/animals in the vicinity!
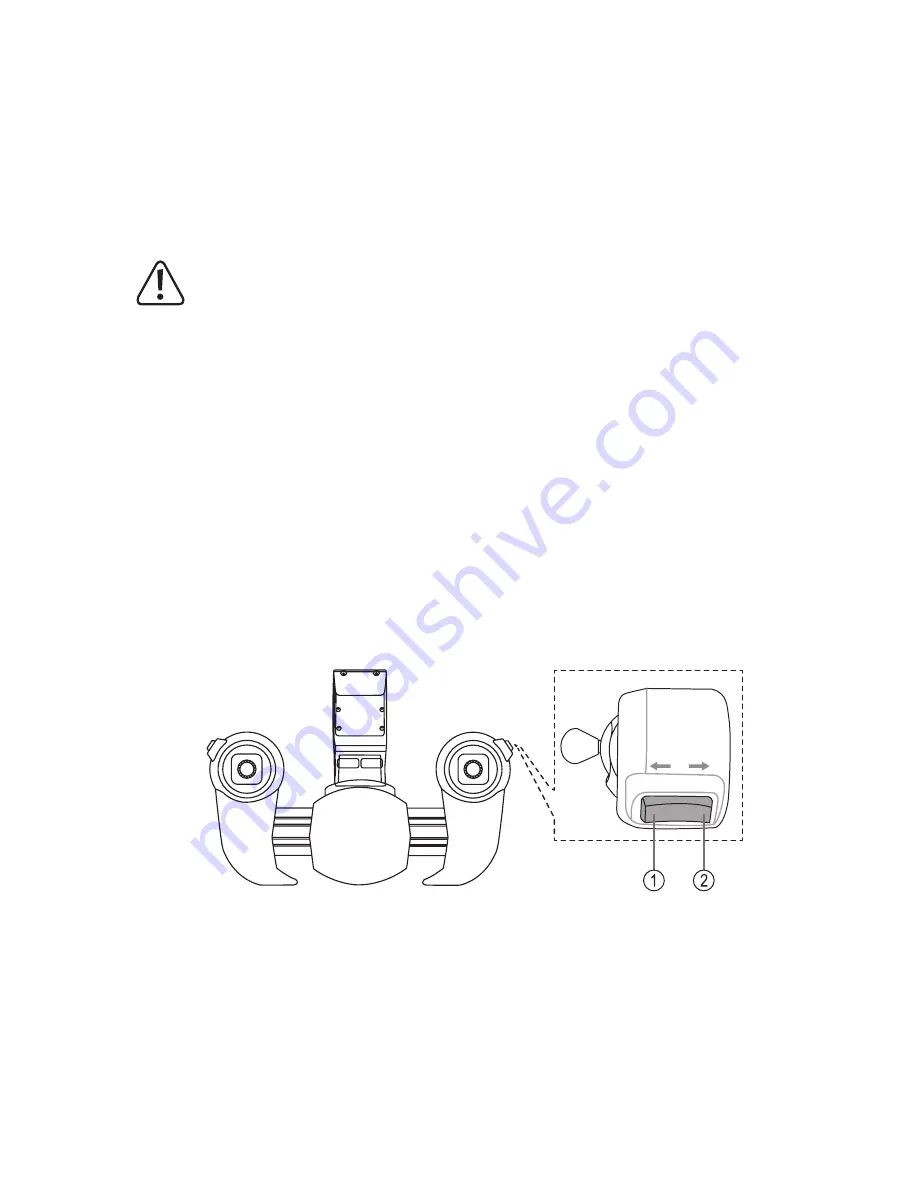
The model can be started and landed by pushing a button. For this, put the ready-to-start quadrocopter onto a level
surface at a sufficient distance from the pilot (see notes above). To start, simply push the corresponding button at the
transmitter (see figure 10, item 1). The rotors at the model will start up at once, and the quadrocopter will rise vertically
up to hover before you at approx. 1.5 - 2 metres height. Now you can perform flight operation by the corresponding
control movements at the transmitter.
For landing, find a suitable landing place (see notes above), put the model into stable hover flight and to a flight
altitude of ideally max. 1.5 metres. Now push the corresponding button (see figure 10, item 2). The model will initiate
landing right after this, reduce height vertically and switch off the rotors on the ground.
Figure 10





















































