





























PILOTSTAR D
4--36
3060.DOC012
Edition: March 13, 2009
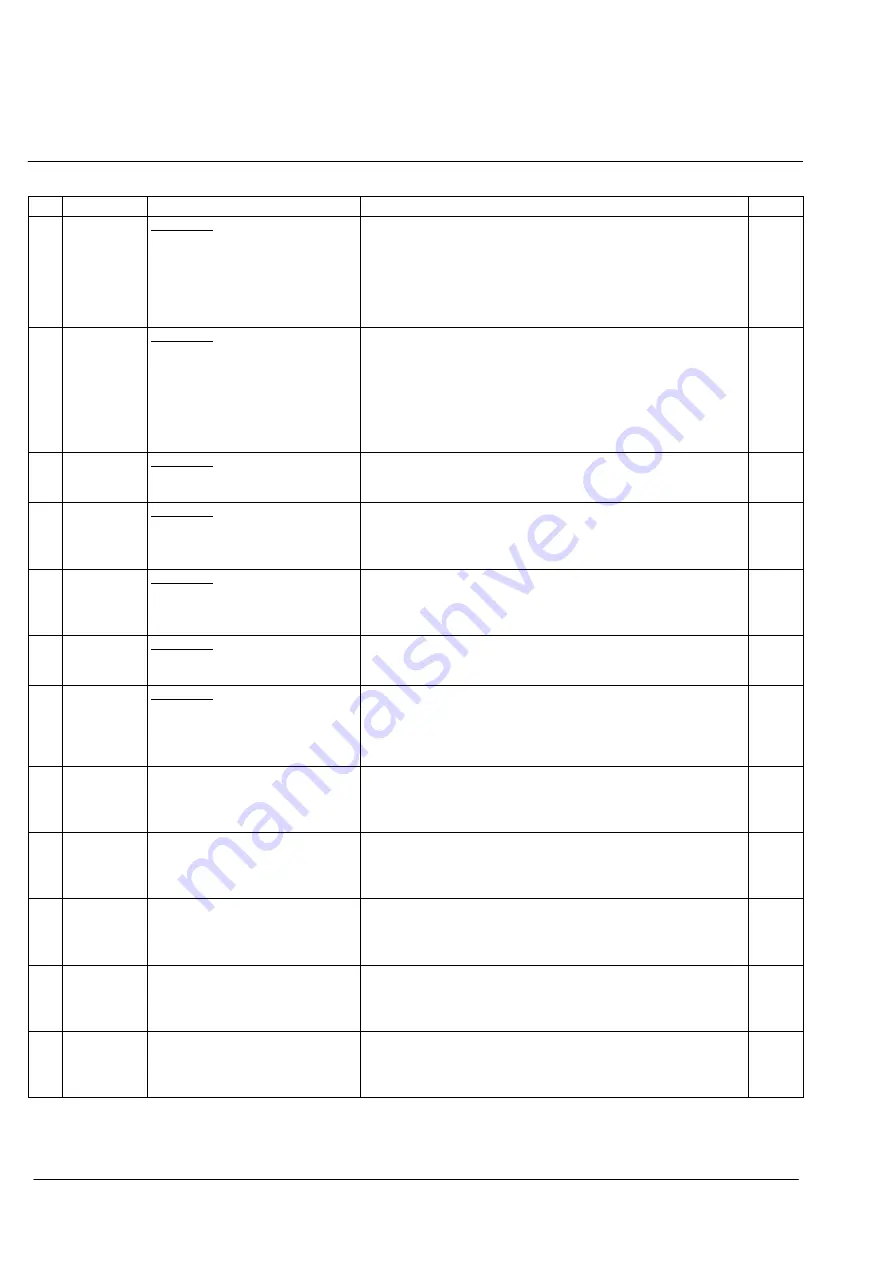
No.
How
Why
When
Parameter
23
:
RUD
SPEED
Set during
Initial Putting into Operation.
Basic setting in the harbour.
When using the rudder angle mo-
nitoring (STEERING FAILURE).
The rudder speed is used to calculate the control time during a
rudder command. If the
t
set
time is exceeded substantially, an
alarm is triggered.
The RUD SPEED and RUD FAIL parameters are dealt with
together.
2.4.1
24
:
RUD FAIL
Set during
Initial Putting into Operation.
Basic setting in the harbour.
The steering gear system should
also be monitored, (Steering Fai-
lure)
Set rudder=actual rudder after
t
set
Additional safety by monitoring the steering gear and the feed-
back system. The tolerance range can be set in steps from 1 to
9 degrees.
2.4.1
25
:
CRS TYPE
Set during
Initial Putting into Operation.
Basic setting in the harbour.
PILOTSTAR D must be set to the physical interface of the gyro
compass system.
2.4.1
Appen.
......
26
:
NAV TYPE
Set during
Initial Putting into Operation.
Basic setting in the harbour.
PILOTSTAR D must be adapted to the ship--specific navigation
reaceiver. For list of available telegramme types, refer to the
Navigation Receiver Manual.
2.4.1
Appen.
.....
27
:
LOG TYPE
Set during
Initial Putting into Operation.
Basic setting in the harbour.
PILOTSTAR D must be adapted to the ship--specific log sen-
sor. For list of available transmission, refer to the Log Sensor
Manual.
2.4.1
Appen.
......
28
:
MAG TYP
Set during
Initial Putting into Operation.
Basic setting in the harbour.
PILOTSTAR D must be set to the physical interface of the
magnetic or fluxgate compass system.
Sonde or coursebus transmission.
2.4.1
Appen.
......
29
:
SER OUT
Set during
Initial Putting into Operation.
Basic setting in the harbour.
If a repeater system is to be con-
nected to the PILOTSTAR D
A digital or an analog repeater indicator can be connected to
the PILOTSTAR D. According to the type of R--Anschütz re-
peater indicator, the corresponding output interface must be
connected.
2.4.1
Appen.
......
30
CHECK-
SUM
Information.
Checksum for data transmission
of control unit and connection
box.
Internal functional check.
2.4.1
31
sin mag...
Information.
When the external signal feed
(magnetic compass--PILOTSTAR
D) is to be checked.
Functional check.
Indicates the coded
sin
magnetic compass signal.
No coded signal: transmission path or compass defective.
2.4.1
Appen.
......
32
cos mag...
Information.
When the external signal feed
(magnetic compass--PILOTSTAR
D) is to be checked.
Functional check.
Indicates the coded
cos
magnetic compass signal.
No coded signal: transmission path or compass defective.
2.4.1
Appen.
......
33
remote ....
Information.
When the external signal feed
(REMOTE--MODE) is to be chek-
ked.
Functional check.
Indicates the hardware status
0= no remote operation
1= free for remote operation
2.4.1
Appen.
......
34
act.rud...
Information.
When the external signal feed
(from the feedback unit) is to be
checked.
Functional check.
Indicates the actual rudder setting from the sensor in ”1/10
”
above the feedback unit. Rudder offset and rudder scaling can
be adjusted.
2.4.1
Appen.
......
Содержание Pilotstar D
Страница 8: ...HSC P i l o t s t a r D VI 3060 DOC012 Edition March 13 2009 Intentionally left blank...
Страница 42: ...PILOTSTAR D 1 26 Edition March 13 2009 3060 DOC012 Intentionally left blank...
Страница 92: ...PILOTSTAR D 2 50 Edition March 13 2009 3060 DOC012 Intentionally left blank...
Страница 144: ...PILOTSTAR D 4 40 3060 DOC012 Edition March 13 2009 Intentionally left blank...
Страница 146: ...PILOTSTAR D Edition March 13 2009 3060 DOC012 Annex Content Intentionally left blank...
Страница 151: ......
Страница 152: ......
Страница 153: ......
Страница 154: ......
Страница 155: ......
Страница 156: ......
Страница 157: ......
Страница 158: ......
Страница 159: ......
Страница 160: ......
Страница 161: ......
Страница 162: ......
Страница 163: ......
Страница 164: ......







































































