


























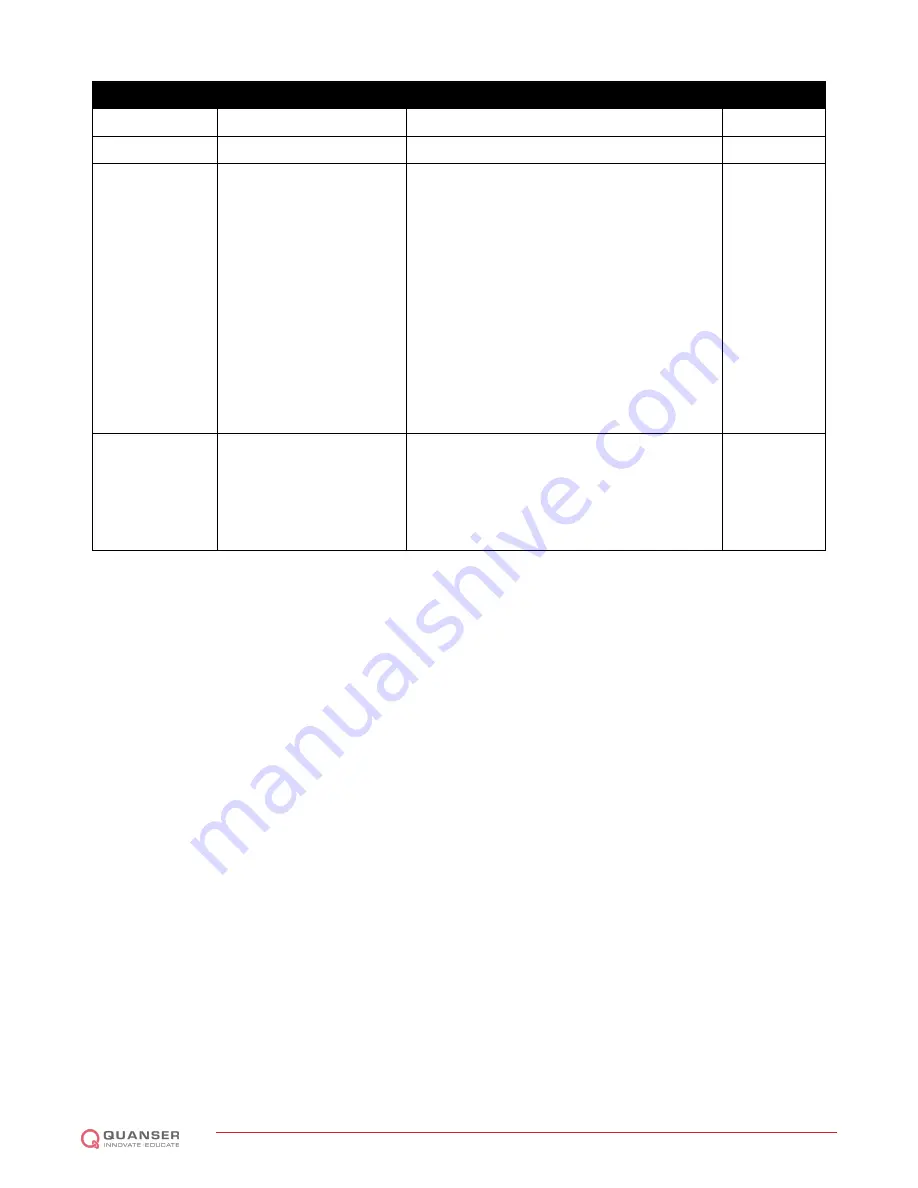
Channel type
Write channel numbers
Description
Units
Analog
none
-
PWM
0 - 3
User PWM outputs
%
Digital
0 - 7
Reconfigurable digital I/O
8
User LED on QBot 2 DAQ
9
LED1 red colour
10
LED1 green colour
11
LED2 red colour
12
LED2 green colour
13
Enable 3.3V power
14
Enable 5V power
15
Enable 12V/5A power
16
Enable 12V/1.5A power
Other
2000
Right wheel speed
m/s
2001
Left wheel speed
m/s
16000
Predefined sound (0=on sound, 1=off sound,
2=recharge, 3=button, 4=error, 5=task start,
6=task end)
-
Table 2.3: QBot 2 output channels
QBOT 2 - User Manual
DRAFT - April 14, 2015
































































