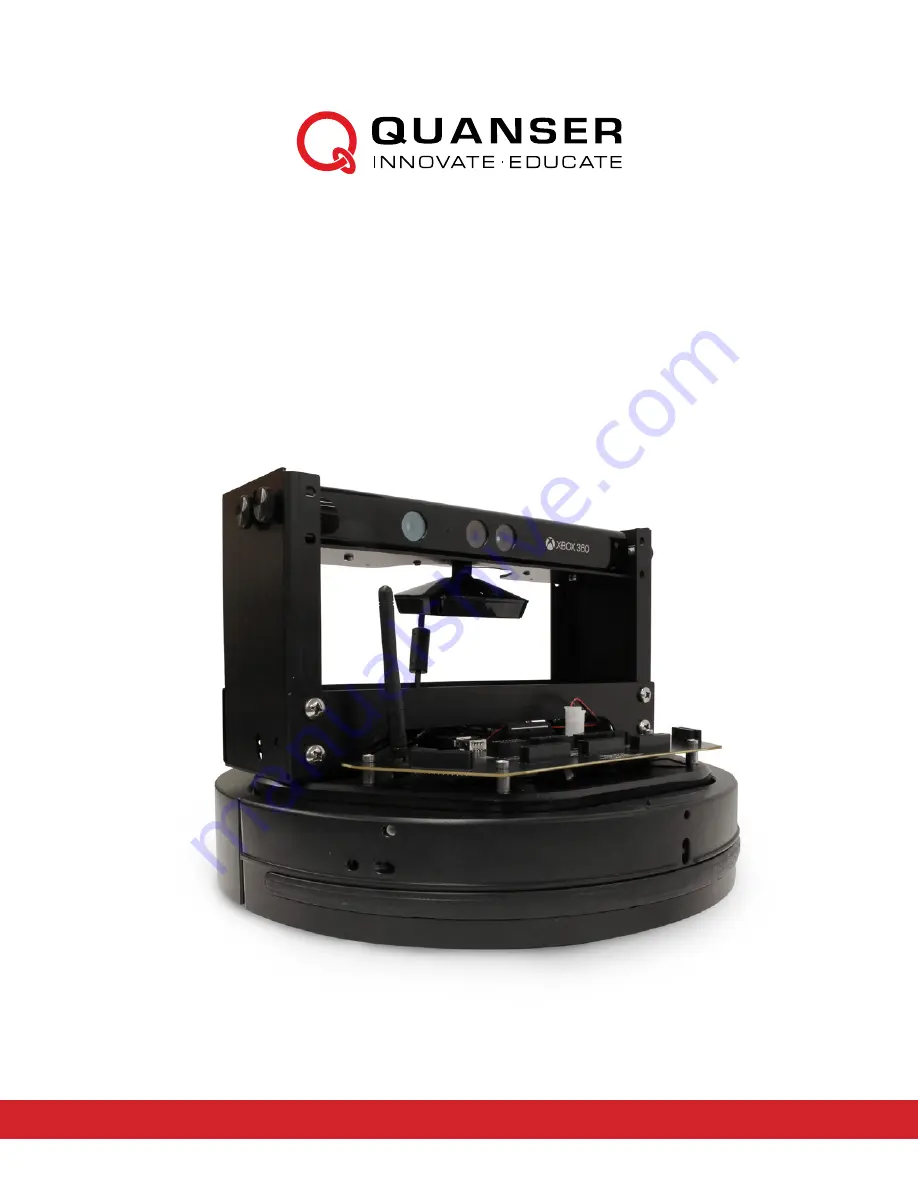
Quanser QBot 2, Руководство пользователя
Quanser QBot 2 - уникальный роботический платформа для обучения и исследований. Руководство пользователя доступно для бесплатного скачивания с нашего веб-сайта. Получите подробное описание функций и инструкции по эксплуатации, чтобы максимально эффективно использовать этот продукт в ваших проектах и исследованиях.
Поделиться
Скачать
















Отзывы:
Нет отзывов
Похожие инструкции для QBot 2

H8CF101
Бренд: Out of the Box Страницы: 6

Dronium One AP
Бренд: Protocol Страницы: 23

NANO DRONE
Бренд: sky viper Страницы: 4

FlyScout AHP+
Бренд: Jamara Страницы: 12

Loky
Бренд: Jamara Страницы: 8

stinger 240
Бренд: Rage Страницы: 12

Typhoon H
Бренд: YUNEEC Страницы: 12

Minivet
Бренд: Wingsland Страницы: 16

COMBO X
Бренд: JJRC Страницы: 16

JJPRO EPIK
Бренд: JJRC Страницы: 24

Wingsland 1554928
Бренд: Conrad Страницы: 2

Pocket Droid
Бренд: AirDroids Страницы: 25

ADII
Бренд: Airdog Страницы: 75

AD10
Бренд: Airdog Страницы: 102





















































