





























phyBOARD-Regor AM335x [PB-01802-xxx]
16
PHYTEC Messtechnik GmbH 2018 L-823e_2
2.2.3
CAN Connectivity (X3, JP3)
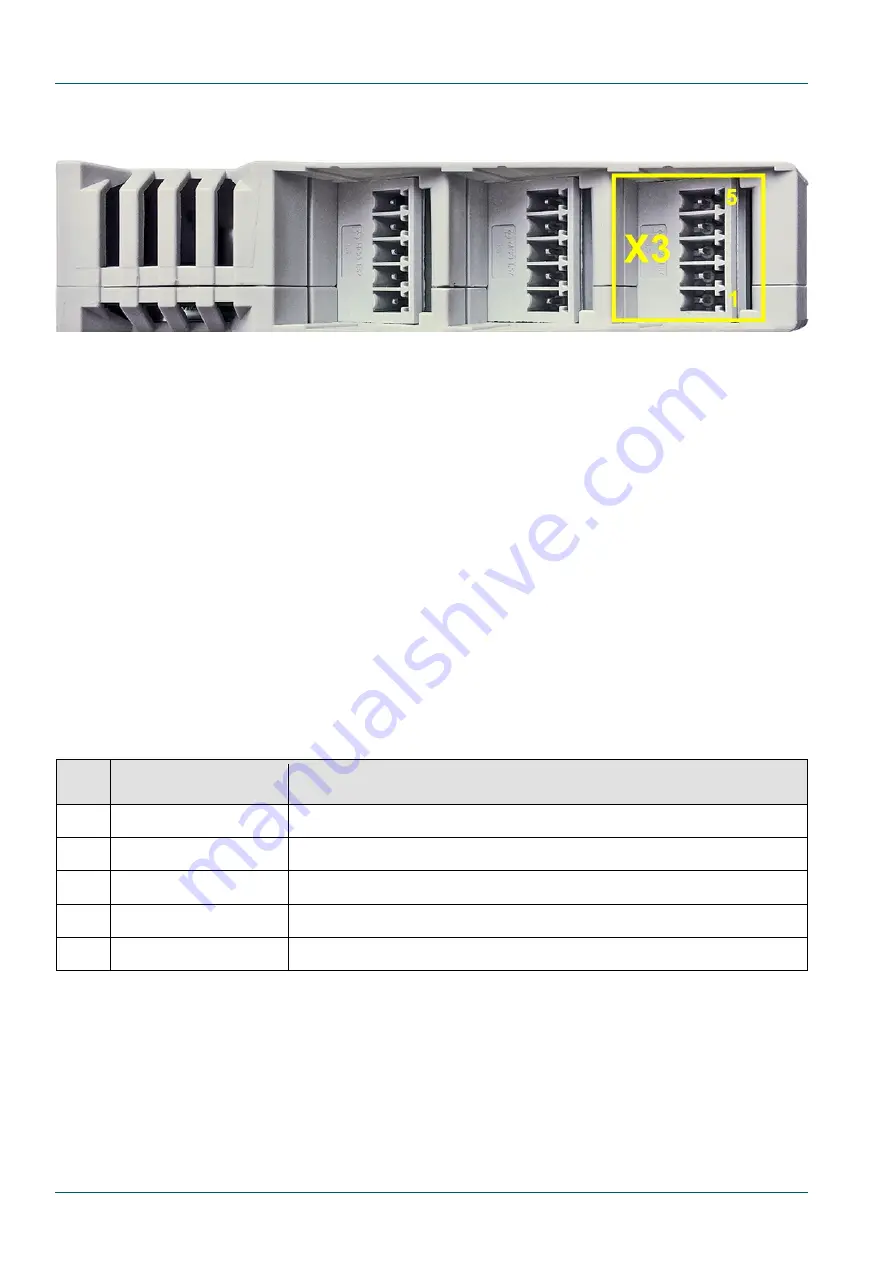
Figure 10: Components supporting the CAN Interface
The Controller Area Network (CAN) bus offers a low-bandwidth, prioritized message
fieldbus for serial communication between microcontrollers. It efficiently supports
distributed real time control with a high level of security. The DCAN module of the AM335x
implements the CAN protocol according to the CAN 2.0B protocol specification and
supports bit rates up to 1 Mbit/s. The CAN interface of the phyBOARD-Regor AM335x is
connected to the CAN-controller DCAN1 of the AM335x SOM.
The CAN interface of the phyBOARD-Regor AM335x is accessible at the Phoenix Contact
MINI COMBICON connector X3 (5 positions, 3.5 mm pitch as shown in
). In case
jumpers J5 and J6 (
) are set to the respective positions, the CAN interface
signals are also available at the card edge connector X7 (
section 2.2.8
). Jumper JP3
) can be installed to add a 120 Ohm termination resistor across the CAN data
lines if needed.
shows the signal mapping of the CAN signals at connector X3.
Pin Signal
Description
1
X_UART1_RS485_A UART1 serial A signal RS-485 level
2
X_UART1_RS485_B UART1 serial B signal RS-485 level
3
GND
Ground
4
X_CANH
CAN High signal line
5
X_CANL
CAN Low signal line
Table 10:
Pin Assignment of CAN Connector X3
Depending on the muxing options, a second CAN interface (DCAN0 of the
phyCORE-AM335x) is available on expansion port X6 (
). DCAN0 (TX and RX) can
be used instead of UART0 (RX and TX) or MMC2 (DAT1 and DAT2).







































































