


























-
61
-
-
60
-
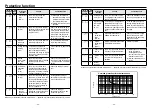
Example setting of motion pattern
Indexing (feeding by fixed length)
• When feeding by fixed length of travel
Indexing
Conveyor
<Example of setting>
• Every time
I
1 is turned on, the motor runs for fixed travel distance.
• Homing operation is executed and the home is set when
I
1 is turned on just once after
power-on. (It is also possible to set power-on position to the home.)
[Signal function setting]
Terminal
symbol
Terminal
number
Terminal
name
Description of function
I
1
1
Signal input 1 Operates when "
I
1" and "GND" are shorted (Homing operation for
the first time after power-on)
I
2
2
Signal input 2 CW operation when "
I
2" and "GND" are shorted, CCW operation
when they are opened (including homing operation mode)
I
3
11
Signal input 3 Motor trips when "
I
3" and "GND" are open.
I
4
4
Signal input 4 Home detected when "
I
4" and "GND" are shorted.
O1
6
Signal output 1 Trip output (Normally on, and off in tripping)
O2
12
Signal output 2 In motion signal (including homing operation)
[Parameter setting]
Indicates only the point changed from default setting.
(Parameter marked with * is effective after power resetting.)
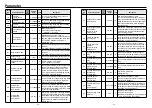
Function
Parameter
No.
(Pr
□□
)
Name of parameter
Setting
Remarks
Selection of signal
function
50*
I
1 function selection
8
Run start (used only for the 1st point)
51*
I
2 function selection
14
Direction switching input
52*
I
3 function selection
0
Forced trip input
53*
I
4 function selection
11
Home sensor input
56*
I
3 input logic selection
1
Changes the polarity of 3 to effective when
open (forced trip in this case).
5C
01 function selection
0
Trip output
5d
02 function selection
2
In-motion signal
Homing function
40
Homing mode
0, 1, 5 Set homing in which to use home sensor.
41
Homing direction
0, 1
Set any desired homing direction.
42
Homing speed
200
Set any desired operation speed.
44
Homing acceleration/
deceleration time
200
Set any desired acceleration/deceleration
time.
48*
Homing function
2
Set to 1 when setting power-on position to
the home.
49
Selecting homing when
motor is free
1
Set to 1 (homing is required again when
tripping occurs.)
4A
Present position overflow
permission
1
Set to 1 (permits overflow).
The 1st point
(indexing length)
00
The 1st target position
(rotation number)
10
Set the travel distance by rotation number
and pulse (one rotation per 288 pulses).
When the setting does not represent
proper mechanical reduction gear ratio,
accumulated error occurs, which results in
dislocation.
01
The 1st target position
(pulse)
0
02
The 1st coordinate setting
0
Set relative travel.
03
The 1st setting speed
2000 Set any desired operation speed.
04, 05 The 1st acceleration time/
The 1st deceleration time
200
Set any desired acceleration time and
deceleration time.
06
The 1st block setting
0
Set normal operation.
<Information>
In this setting,
I
3 is set to forced trip when open. Connect an emergency stop switch or the
like which is shorted but open at error to
I
3 terminal.
Please note that the motor will not run due to forced trip without such connection.
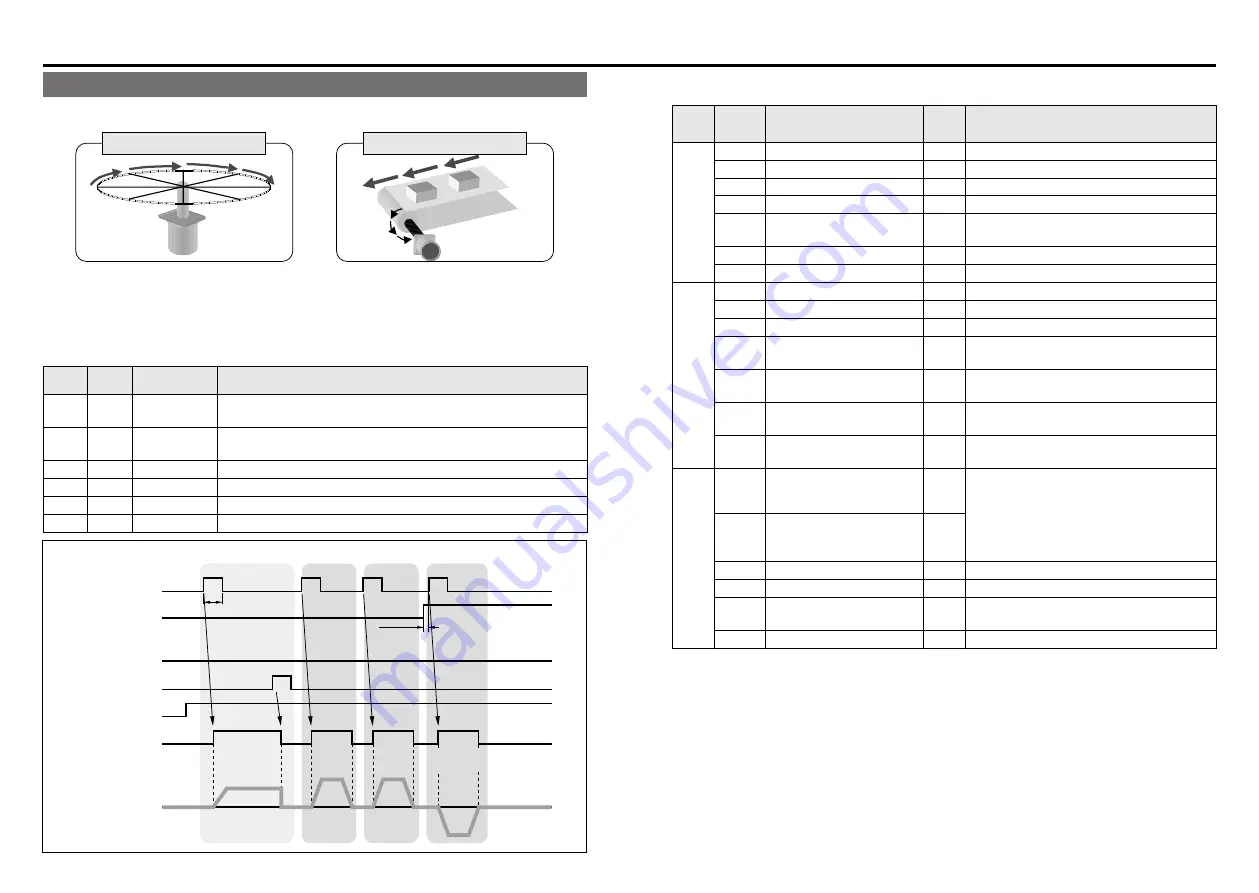
Run start
Home detected
Turns off normally in short-circuiting
(forced trip in opening).
20ms or longer
Execute
homing
Execute
indexing
Execute
indexing
Execute indexing
(Reverse direction)
Power-ON
Normally ON.
Run start Run start
Run start
I
1 (Run start)
I
2 (Direction switching)
I
3 (Forced trip)
I
4 (Home sensor)
O1 (Trip output)
O2 (In motion)
Motor commanded
speed
In changing direction, first
change
I
2, and then turn on
I
1 after 20 ms or longer
have passed.
When homing is set to unnecessary,
homing operation is not executed but
indexing operation is started.
Turn on power, and then turn on
I
1 after one second or longer
have passed.
[Operation timing chart]
20 ms or
longer







































































