



























-
49
-
-
48
-
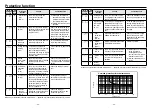
Detail of parameters
[2] Sequential run (using sequential run start signal)
Set Pr50 to 53 as follows, and assign the function of signal input.
Of signal inputs 1 to 4 (
I
1 to
I
4), set the input parameter used for run start at “9” (sequential
run start).
Positioning point number is incremented by one whenever the sequential run start signal
is turned on. (When homing is completed, the initial run start point is always the 1st
point.)
The maximum of run point can be set by Pr22.
e.g.) When Pr22 is 3, the motor runs in the order: the 1st point
→
the 2nd point
→
the 3rd point
→
the 1st point
→
... whenever run command is input.
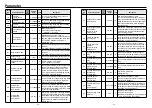
[Command timing chart]
Commanded
Point selection (input)
MIN 10 ms
MAX 10 ms
Speed
Run start signal (input)
or sequential run
start signal (input)
In-motion signal (output) OFF
OFF
ON
ON
ON
OFF
OFF
OFF
ON
In-position signal (output)
Actual speed
(1) Choose a point number for point designation run. Point designation is not required
(made ineffective) in sequential operation.
(2) Set the run start signal at (ON (Default setting: ON when shorted to GND)). It acti-
vates operation.
(3) Make sure that in-motion signal (BUSY) is on, and then return the run start signal to
off. (Assign the function of in-motion signal to signal output 01 or 02 by Pr5E and 5F.)
Alternatively, turn on the run start signal, and turn it off in 20msec. Changing the next
point designation number for positioning operation at this point causes no problem.
(4) When positioning operation is completed, in-motion signal (BUSY) returns to off. (If
the run start signal is not off, positioning when operation is completed, in-motion sig-
nal still remains on.) In-position signal, after completion of command output, turns on
when position error (difference between command position and actually reached po-
sition) is below setting of Pr38.
• Operation instruction can be given to the motor only when in-motion signal is off.
• Block operation
This motor allows continuous positioning to more than one point by single operation in-
struction (continuous block operation) or changing the speed setting on the way of opera-
tion (combined block operation) when block operation is set.
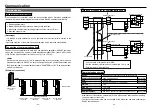
[1] Continuous block operation
Continuous block run is executed by setting the block setting parameter (Pr06, 0E, 16,
and 1E) at “1”, and giving run start command by any procedure.
When command output of point is completed, command output of the following points is
started when set waiting time (Pr07, 0F, 17, and 1F) has elapsed.
e.g.) When run command is given to the 1st point by setting Pr06 = 1, Pr0E = 1,
and Pr16 = 0
Commanded speed
The 1st
point
Pr07
Waiting time
ON OFF
ON
ON
ON
ON
OFF
OFF
OFF
OFF
ON
OFF
OFF
Pr0F
Waiting time
The 2nd point
The 3rd point
Run start signal
(input)
In-motion signal
(output)
In-position signal
(output)
• When block setting parameters (Pr06, 0E, 16, and 1E) are all set to “1”, single run
start command allows the motor to keep moving in the order: the 1st point
→
the 2nd
point
→
the 3rd point
→
the 4th point
→
the 1st point
→
... until stop signal is input.
• Changing the value of Pr22 “Sequential run maximum point number” allows the motor
to keep moving in the order: the 1st point
→
the 2nd point
→
the 3rd point
→
the 1st
point
→
... even when block setting parameters are all “1” (when Pr22 = 3).
[2] Combined block operation
When block setting parameter (Pr06 and 16) is set to “2”, and run start command is given
to the 1st or 3rd point in any procedure, combined block operation of the 1st point + 2nd
point (or the 3rd point + the 4th point) is executed.
Positioning operation completion position in combined block operation is determined by
the 2nd point (or the 4th point). Position for changing speed setting is determined by the
1st point (or the 3rd point).
Coordinate setting of each point can be either by relative travel or absolute travel.
When the 2nd point (or the 4th point) which is the positioning operation completion
position is set by relative travel, coordinate is calculated by target position of the 1st point
(or the 3rd point), and by run start position in the case of absolute travel.







































































