





















Sigma-5 servo drive
7
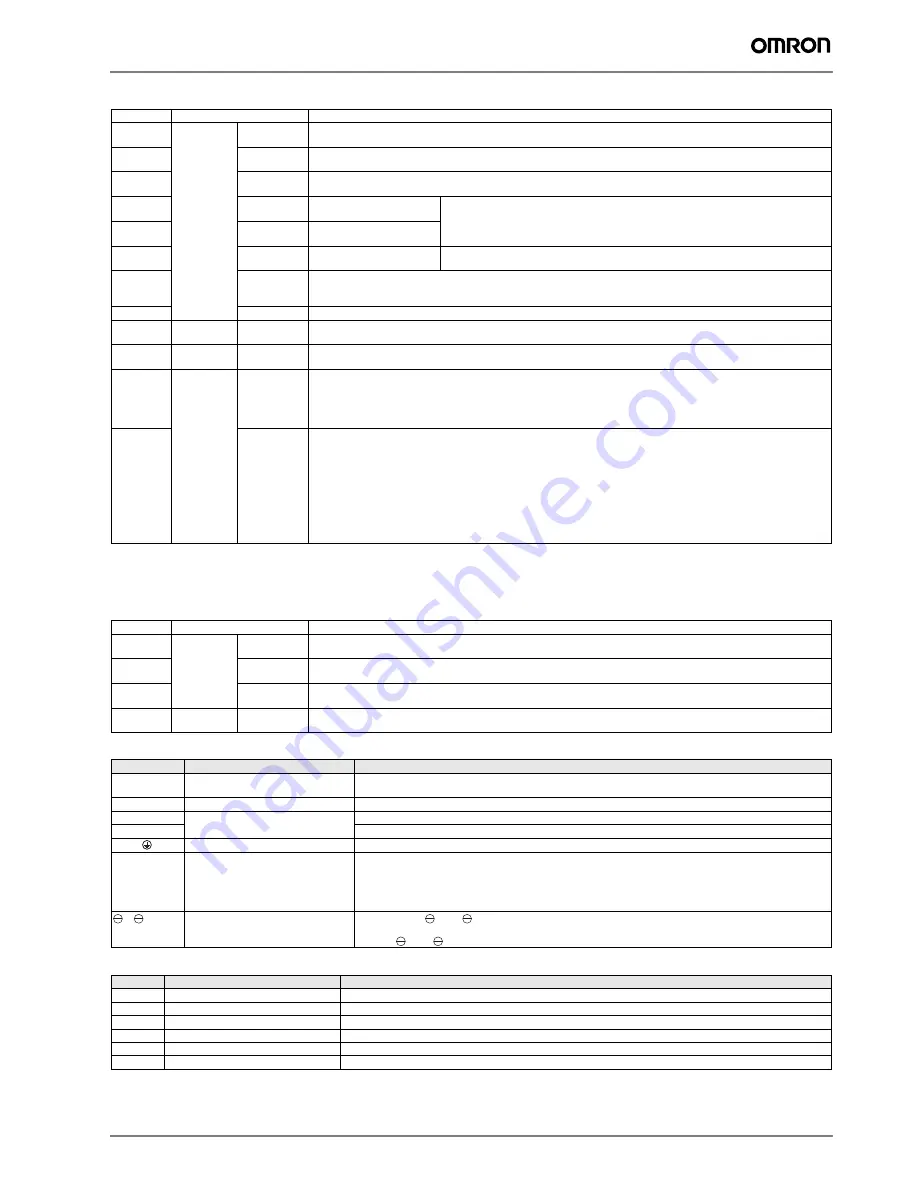
I/O signals (CN1) - output signals
Note: 1.
Pin numbers in parentheses () indicate signal grounds.
2.
The functions allocated to /TGON, /S-RDY, and /V-CMP (/COIN) output signals can be changed by using the parameters. /CLT, /VLT, /
BK, /WARN and /NEAR signals can also be changed.
I/O signals (CN8) - safety signals
Terminal specifications
Encoder connector (CN2)
Pin No.
Signal Name
Function
31
32
Common
ALM+
ALM-
Servo alarm: Turns OFF when an error is detected.
27
2
8
/TGON+
/TGON-
Detection during servo motor rotation: detects when the servo motor is rotating at a speed higher than the motor speed
setting.
29
30
/S
-
RDY+
/S
-
RDY-
Servo ready: ON if there is no servo alarm when the control/main circuit power supply is turned ON.
33
34
PAO
/PAO
Phase-A signal
Two-phase pulse encoder output pulse signal
35
36
PBO
/PBO
Phase-B signal
19
20
PCO
/PCO
Phase-C signal
Zero-point pulse signal
37 (1)
3
8
(1)
39 (1)
ALO1
ALO2
ALO3
Alarm code output: Outputs 3-bit alarm codes.
Shell
FG
Connected to frame ground if the shield wire of the I/O signal cable is connected to the connector shell.
25
26
Speed
/V
-
CMP+
/V
-
CMP-
Turns ON when whether the motor speed is within the setting range is detected and if it matches the reference speed
value.
25
26
Position
/COIN+
/COIN-
Turns ON when the number of position error pulse reaches the value set.
-
Reserved
/CLT
/VLT
/BK
/WARN
/NEAR
Reserved terminals
The functions allocated to /TGON, /S-RDY, and /V-CMP (/COIN) can be changed by using the parameters.
/CLT, /VLT, /BK, /WARN and /NEAR signals can also be changed.
3
13
16
17
1
8
23
24
4
8
49
50
-
Terminals not used.
Do not connect.
Pin No.
Signal Name
Function
4
3
Common
/HWBB1+
/HWBB1-
Hard wire baseblock input 1
6
5
/HWBB2+
/HWBB2-
Hard wire baseblock input 2
8
7
EDMI+
EDMI-
Monitored circuit status output 1:
ON when the hard wire baseblock function is normally activated.
1
2
Reserved
-
Terminals not used.
Do not connect.
Symbol
Name
Function
L1, L2 or
L1, L2, L3
Main circuit AC input terminal
AC power input terminals for the main circuit
U, V, W
Servo motor connection terminal
Terminals for outputs to the servo motor.
L1C, L2C
Control power input terminal
AC power input terminals for the control circuit.
24V, 0V
24V DC power input terminals for the control circuit.
Frame ground
Ground terminal. Ground to a maximum of 100
Ω
. (class 3).
B1/
⊕
, B2, B3
Main circuit DC output terminal
Up to 400 W:
If the regenerative capacity is insufficient, connect an external regenerative resistor
(option) between B1/
⊕
and B2.
From 500 W to 5 kW: Normally short B2 and B3. If the internal regenerative resistor is insufficient, remove
the wire between B2 and B3 and connect an external regenerative resistor between
B1/
⊕
and B2.
1,
2
DC reactor connection terminal for
suppressing power supply harmonic
waves
Normally, short
1 and
2.
If a countermeasure against power supply harmonic waves is needed, connect a DC reactor
between 1
and 2.
Pin No.
Signal Name
Function
1
E5V
Encoder power 5 V
2
E0V
Encoder power supply ground
3
BAT+
B (used only with absolute encoder)
4
BAT–
Battery – (used only with absolute encoder)
5
S+
Encoder serial signal input
6
S–
Encoder serial signal input







































































