





























3-39
3 Specifications
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
3-5 Rea
ctor Sp
ecification
s
3
3-5
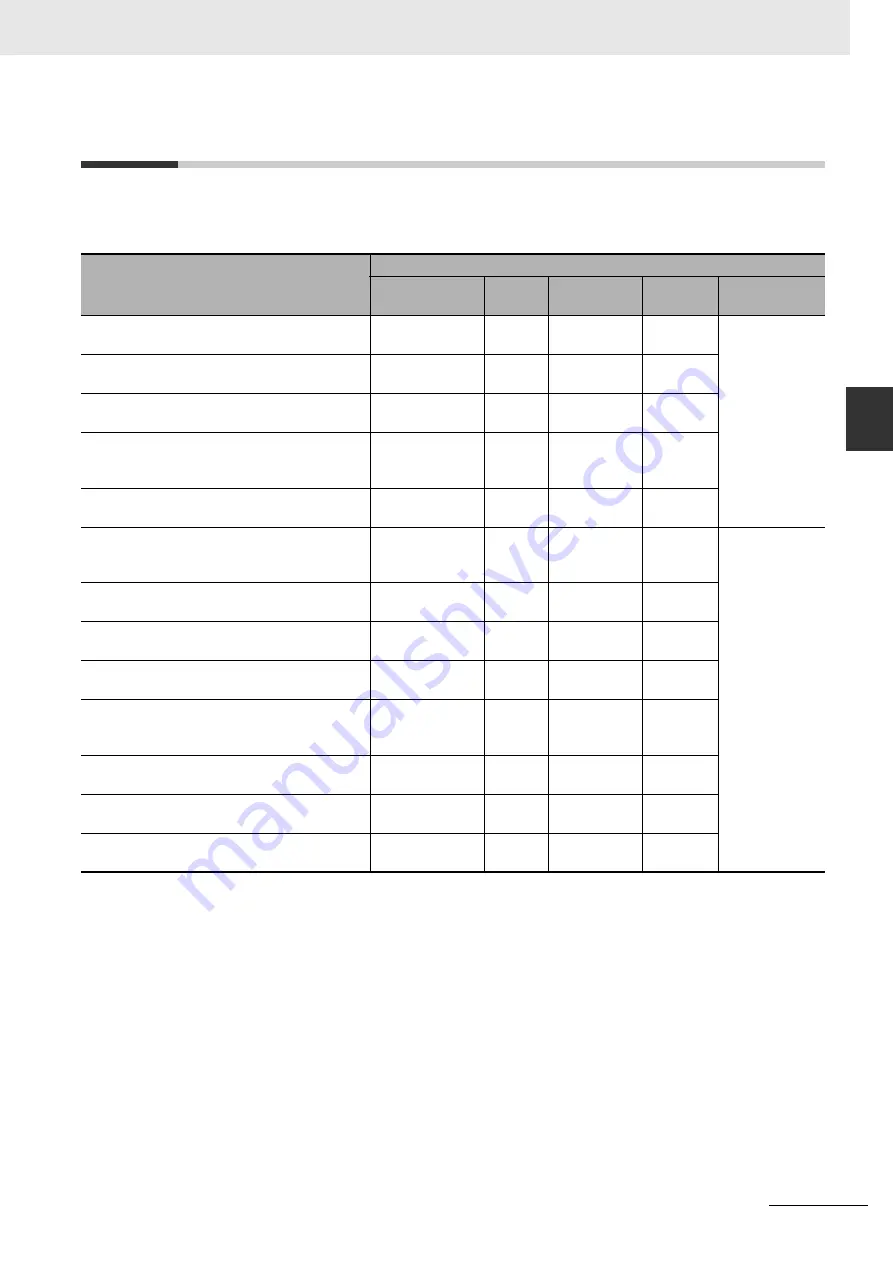
Reactor Specifications
A Reactor is connected to the Servo Drive to suppress harmonic currents.
Select an appropriate Reactor for your Servo Drive model.
Servo Drive model
Reactor
Model
Rated
current
Inductance
Weight
Reactor Type
R88D-KN01H-ECT-L (For single-phase input)
3G3AX-DL2002
1.6 A
21.4 mH
Approx.
0.8 kg
DC reactor
R88D-KN01L-ECT-L
R88D-KN02H-ECT-L (For single-phase input)
3G3AX-DL2004
3.2 A
10.7 mH
Approx.
1.0 kg
R88D-KN02L-ECT-L
R88D-KN04H-ECT-L (For single-phase input)
3G3AX-DL2007
6.1 A
6.75 mH
Approx.
1.3 kg
R88D-KN04L-ECT-L
R88D-KN08H-ECT-L
R88D-KN10H-ECT-L (For single-phase input)
3G3AX-DL2015
9.3 A
3.51 mH
Approx.
1.6 kg
R88D-KN15H-ECT-L (For single-phase input)
3G3AX-DL2022
13.8 A
2.51 mH
Approx.
2.1 kg
R88D-KN08H-ECT-L
R88D-KN10H-ECT-L
R88D-KN15H-ECT-L (For 3-phase input)
3G3AX-AL2025
10.0 A
2.8 mH
Approx.
2.8 kg
AC reactor
R88D-KN20H-ECT-L
R88D-KN30H-ECT-L
3G3AX-AL2055
20.0 A
0.88 mH
Approx.
4.0 kg
R88D-KN50H-ECT-L
3G3AX-AL2110
34.0 A
0.35 mH
Approx.
5.0 kg
R88D-KN75H-ECT-L
R88D-KN150H-ECT-L
3G3AX-AL2220
67.0 A
0.18 mH
Approx.
10.0 kg
R88D-KN06F-ECT-L
R88D-KN10F-ECT-L
R88D-KN15F-ECT-L
3G3AX-AL4025
5.0 A
7.7 mH
Approx.
2.7 kg
R88D-KN20F-ECT-L
R88D-KN30F-ECT-L
3G3AX-AL4055
10.0 A
3.5 mH
Approx.
4.0 kg
R88D-KN50F-ECT-L
3G3AX-AL4110
17.0 A
1.3 mH
Approx.
6.0 kg
R88D-KN75F-ECT-L
R88D-KN150F-ECT-L
3G3AX-AL4220
34.0 A
0.74 mH
Approx.
10.0 kg
Содержание R88D-KN series
Страница 28: ...Revision History 26 G5 Series AC Servo Drives With Built in EtherCAT Communications Linear Motor Type...
Страница 114: ...3 Specifications 3 40 G5 Series AC Servo Drives With Built in EtherCAT Communications Linear Motor Type...
Страница 172: ...4 System Design 4 58 G5 Series AC Servo Drives With Built in EtherCAT Communications Linear Motor Type...
Страница 190: ...5 EtherCAT Communications 5 18 G5 Series AC Servo Drives With Built in EtherCAT Communications Linear Motor Type...
Страница 208: ...6 Basic Control Functions 6 18 G5 Series AC Servo Drives With Built in EtherCAT Communications Linear Motor Type...
Страница 250: ...7 Applied Functions 7 42 G5 Series AC Servo Drives With Built in EtherCAT Communications Linear Motor Type...
Страница 258: ...8 Safety Function 8 8 G5 Series AC Servo Drives With Built in EtherCAT Communications Linear Motor Type...
Страница 336: ...10 Operation 10 14 G5 Series AC Servo Drives With Built in EtherCAT Communications Linear Motor Type...
Страница 560: ...Appendicies A 160 G5 Series AC Servo Drives With Built in EtherCAT Communications Linear Motor Type...
Страница 561: ...Index 1 G5 Series AC Servo Drives With Built in EtherCAT Communications Linear Motor Type I Index...
Страница 568: ......
Страница 569: ......







































































