



















8
AC servo systems
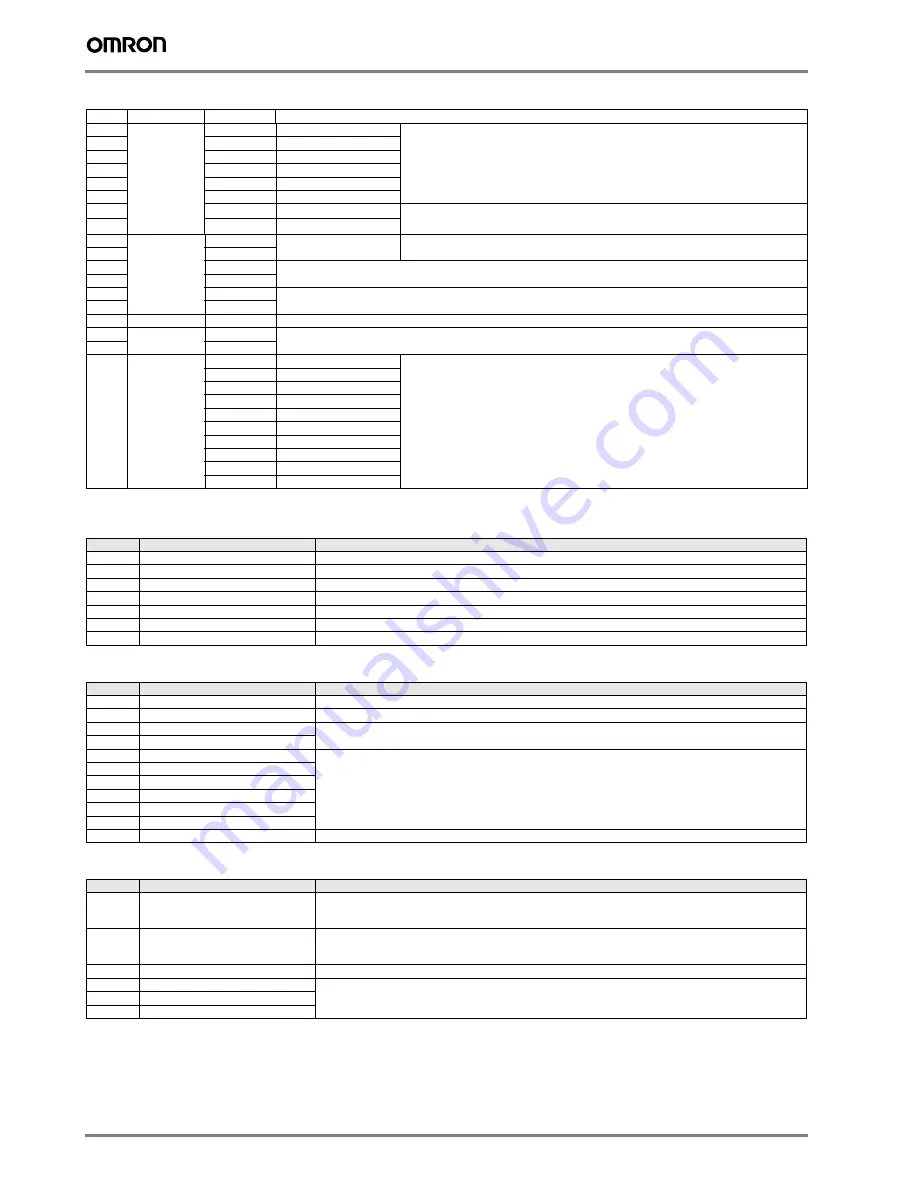
I/O signals (CN1) - output signals
(for analog/pulse servo drives)
Encoder connector (CN2) - (for all servo drives)
External encoder connector (CN4) - (for all servo drives)
Monitor connector (CN5) - (for all servo drives)
Pin No. Control mode
Signal name
Function
21
Position/
Full close loop
+A
Encoder phase A+
Encoder signals (or external scale signals during full closing control) are output according En-
coder Dividing Numerator parameter.
This is the line-driver output (equivalent to R422). The maximum output frequency is 4 Mbps.
Phase Z is output for encoder signals (or external scale signals during full closing control). This
is the line-driver output (equivalent to R422).
22
-A
Encoder phase A-
48
+B
Encoder phase B+
49
-B
Encoder phase B-
23
+Z
Encoder phase Z+
24
-Z
Encoder phase Z-
19
Z
Encoder phase-Z output
Phase Z is output for encoder signals (or external scale signals during full closing control).
Open-collector output.
25
ZCOM
Encoder phase-Z common
11
Common
BKIR
Brake release signal output Timing signal for operating the electromagnetic brake on a motor.
10
BKIRCOM
35
READY
Servo ready: ON if there is not servo alarm when the control/main circuit power supply is turned ON.
34
READYCOM
37
/ALM
Servo alarm: turns OFF when an error is detected.
36
ALMCOM
39
Speed/torque
TGON
Motor rotation speed detection. This output turns ON when the motor rotation speed reaches the speed set in a parameter.
39
Position/
Full close loop
INP1
Positioning complete output 1: turns ON when position error is equal to setting parameter.
38
INP1COM
-
-
INP2
Position complete output 2 The function of output signals allocated to pins 11,10, 34 to 39 can be changed with these op-
tions by parameters settings.
P-CMD
Position command status
ZSP
Zero speed
WARN1
Warning 1
WARN2
Warning 2
ALM-ATB
Alarm output
VCMP
Speed conformity output
V-CMD
speed command status
V-LIMIT
Speed limit detection
T-LIMIT
Torque limit detection
Pin No.
Signal Name
Function
1
E5V
Encoder power 5 V
2
E0V
Encoder power supply ground
3
BAT+
B (used only with absolute encoder)
4
BAT–
Battery – (used only with absolute encoder)
5
PS+
Encoder serial signal input (+phase)
6
PS–
Encoder serial signal input (-phase)
Shell
FG
Shield ground
Pin No.
Signal Name
Function
1
E5V
External scale power supply output. Use at 5.2V +/-5% and at or below 250 mA.
2
E0V
This is connected to the control circuit ground connected to connector CN1.
3
PS
External scale signal I/O (serial signal).
4
/PS
5
EXA
External scale signal input (Phase A, B, and Z signals). Perfoms the input and output of phase A, B and Z signals.
6
/EXA
7
EXB
8
/EXB
9
EXZ
10
/EXZ
Shell
FG
Shield ground
Pin No.
Signal Name
Function
1
AM1
Analog monitor output 1. Outputs the analog signal for the monitor. Use the parameters setting to select the output
to monitor.
Default setting: Motor rotation speed 1 V/(1000 r/min).
2
AM2
Analog monitor output 2. Outputs the analog signal for the monitor. Use the parameters setting to select the output
to monitor.
Default setting: Motor rotation speed 1 V/(1000 r/min).
3
GND
Ground for analog monitors 1,2.
4
-
Terminals not used. Do not connect.
5
-
6
-







































































