










TWRS08PT60LAB
TWR
‐
S08PT60
Lab
Guide
Page
10
of
11
11
Lab
8—BLDC
demo
This lab will demonstrate how to implement a simple BLDC motor control with the FlexTimer module FTM2
which is designed to support motor control, digital power conversion and other applications that require
PWM signals. It will use touch pad 0 and touch pad 1 to control the motor speed and the rotation direction.
The start and stop of the motor’s spin are controlled via the keyboard interface SW2. This lab requires a
special connection from the general purpose TWRPI connectors on the board to the 40-pin daughter card
connector P1 on APMOTOR56F800E which can be ordered from the Freescale website:
www.freescale.com/tower
The following steps show how to work with this demo:
1.
Download S08PT60_BLDC_demo code to the board via OSBDM.
2.
Disconnect the USB cable from PC to turn off power to the board.
3.
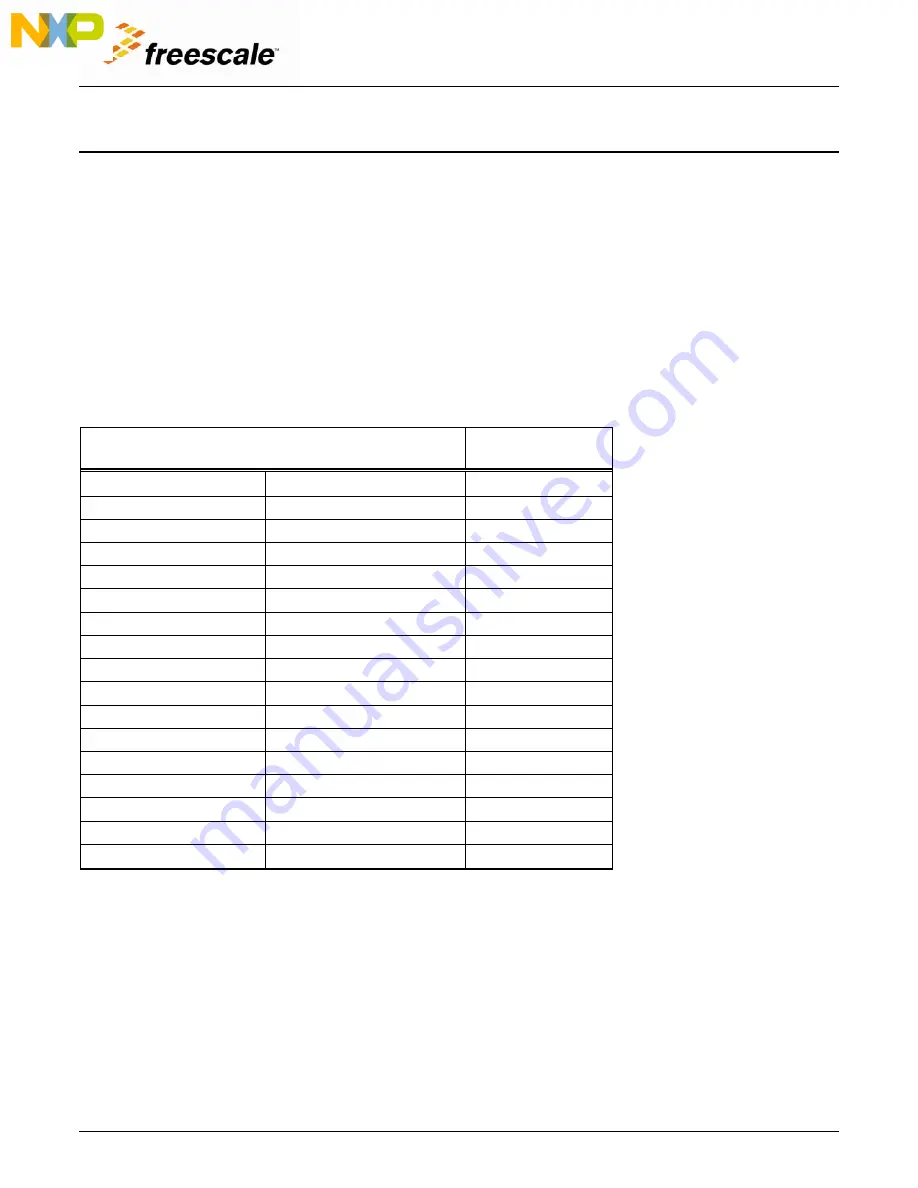
Connect general purpose TWRPI connector of the board to P1 of APMOTOR56F800E as below:
General
Purpose
TWRPI
pin
Motor
connector
pin
left
side
connector(J10)
right
side
connector
(J11)
(P1)
2
1
3
3
14
9
15
11
16
30
18
32
19
34
20
36
8
13
13
11
15
12
19
7
10
15
12
16
18
20
22
On JG1 of APMOTOR56F800E, short Pin 2&3, 5&6,8&9.
4.
Apply 9V DC power supply to P2 of APMOTOR56F800E. Check D5, D7 to D10. They are lit.
5.
Press and release SW2 which sets motor to be ready state.
6.
Touch pad 0, the motor starts to run in clockwise direction. Repeat touching pad 0, the motor speed
will be increased up to the maximum. Both D7 and D8 flash to reflect the signals from the hall
sensor.