





























~ 17 ~
NOVATEK-ELECTRO UBZ-305
–
for improper phase sequence;
–
for decreasing of mains frequency lower that setting;
–
for increasing of mains frequency higher that setting;
–
for minimum insulation resistance of the motor winding;
–
for the motor phase loss (protection is operated when the motor current is disabled in one (two) phase).
2.4.2
Maximum phase current protection is of three-phase type.
Maximum current protection on phase is three phase. It is enabled when one, two or three current values
reach the actuation set-point.
The protection has time delay. The time delay can be definite (constant) or dependent (inverse-definite -
SIT
;
very inverse-definite -
VIT
or
LTI
; extremely inverse-definite -
EIT
; ultra inverse-definite -
UIT
, time delay of
RI
type) - curves are shown in Appendix
А.
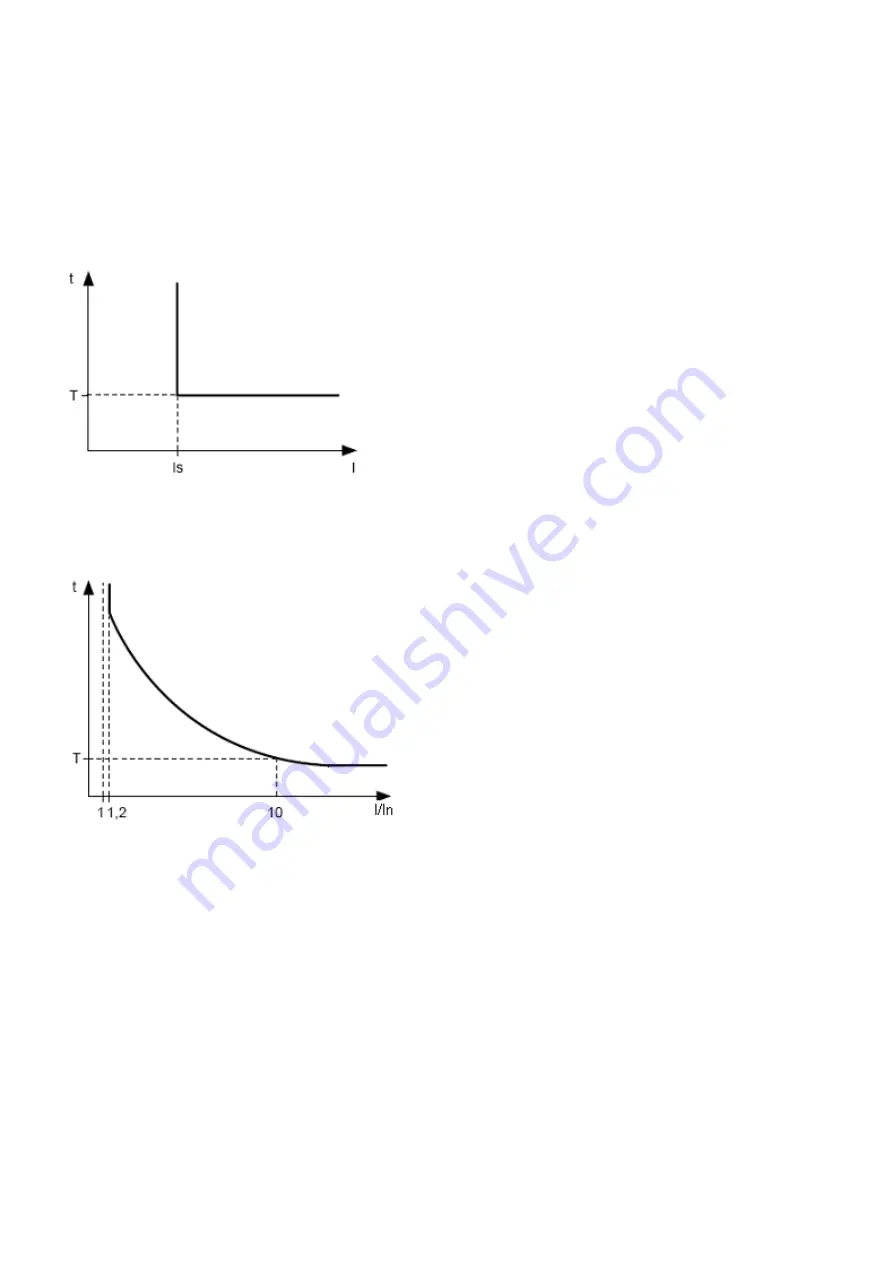
In case of the protection with definite time delay the motor is off
when the current of one phase is more than specified for the time
T (“Imax delay” parameter).
Is = “Imax coef” (tripping ratio); * “Rated Inom” (motor
rated current), and T is the delay time of the protection operation
(“Imax delay“).
Example: When
“Imax coef“ = 4.0, “Rated Inom” = 10,
“Imax delay“ = 10.0, the motor will switch off in 10 seconds after
one of the phase currents exceeds 40 amp.
Fig.2.2
– Principle of protection with definite time delay
Protection with dependent time delay corresponds to the standards IEC 60255-3 and BS 142.
In corresponds to the set-point
“Rated Inom” (motor
rated current);
T (“Imax delay” parameter is time constant of the
protection operation) corresponds to time delay of tripping
for 10*In.
For very large currents the protection has a feature
with definite time delay:
Fig.2.3
– Principle of protection with dependent time delay
Appendix
А provides curves for the time constant of the protection to equal 1 second (“Imax delay” parameter).
When setting the different value of the time constant, the response time of the protection is changed
proportional to the time constant (for example, when “Imax delay” = 10 seconds, operating time of protection at
the same ratio of currents will increase 10 times).
2.4.3
Ground fault protection:
–
It is enabled when ground-fault current reaches the tripping threshold
(“I earth tresh” parameter);
–
the motor switches off if the ground-fault current is more than specified for the time T
(“I earth delay”
parameter).
2.4.4
Negative-sequence current protection (imbalance)
Negative-sequence current protection (imbalance) is enabled when a component of the negative sequence
is more than the set-poi
nt (“I2 rev tresh” parameter) and stops the motor when time of this excess is more than
specified value (“I2 rev delay” parameter”).
If the analysis of tripping cause is enabled
(“A-s I2 prot”=”On”), then in case of protection tripping due to
exceeding of negative sequence current not because of line voltages imbalance (in this case the motor
problems are assumed), ARS after tripping will not occur (regardless of the value of “I2 rev protec” parameter).
The coefficient of negative voltage (current) sequence is characteristic of unbalance of three-phase voltage
(current). Approximately the coefficient of negative voltage sequence is determined by the formula: