





























Chapter 4
Signal Connections
4-8
ni.com
Refer to the
Connecting Inputs to the PCI-7390
information about connecting inhibit-in and in-position inputs. You can
use software disabled inhibit-in (alarm) and in-position inputs as
general-purpose inputs. You can read the status of these inputs at any time
and change their active state as required.
Inhibit-in (alarm) and in-position inputs are a per axis enhancement on the
PCI-7390 controller and are not required for basic motion control. These
inputs are part of a system solution for complete motion control.
Encoder Inputs
The PCI-7390 offers four channels of quadrature encoder inputs. Each
channel consists of differential Phase A, Phase B, and Index (Phase Z)
inputs, as described in the following sections. The encoder inputs are
optically isolated, differential and RS-422 compatible. The encoder input
interface circuit converts the differential inputs to single-ended signals as
shown in Figures 4-7 and 4-8. The encoder signals are used for position and
velocity feedback for absolute and relative positioning of axes. You can
accommodate encoders with various phase relationships by swapping the
signals as required by the application.
Note
The PCI-7390 does
not
support single-ended encoders.
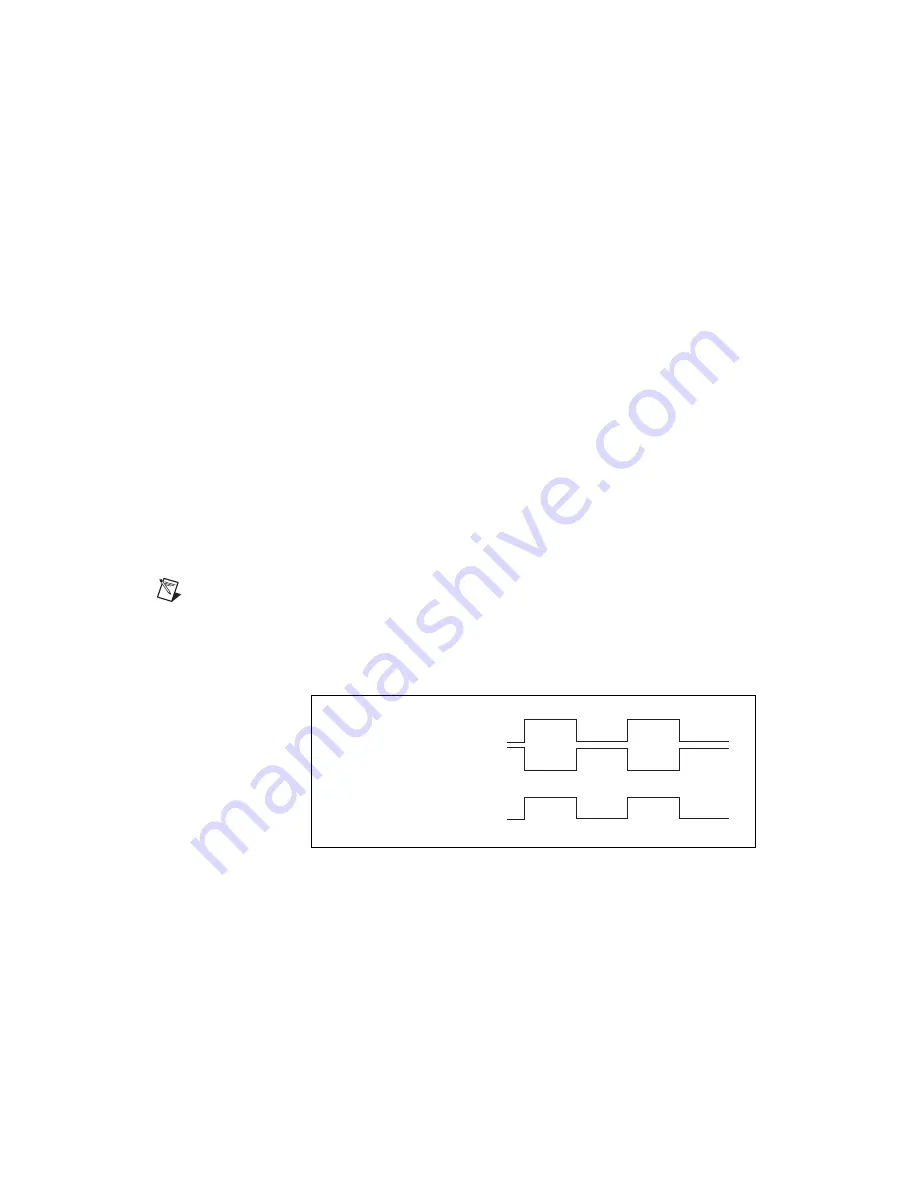
Figure 4-4 shows the differential encoder input signals and the resulting
single-ended signal for Phase A. Phases B and Index are converted in the
same way as Phase A.
Figure 4-4.
Differential to Single-Ended Encoder Signal for Phase A
Axis <1..4> Encoder Phase A+
Axis <1..4> Encoder Phase A–
Encoder Phase A







































































