



























Getting Started with AKD EtherCAT Drives and NI SoftMotion
|
© National Instruments
|
17
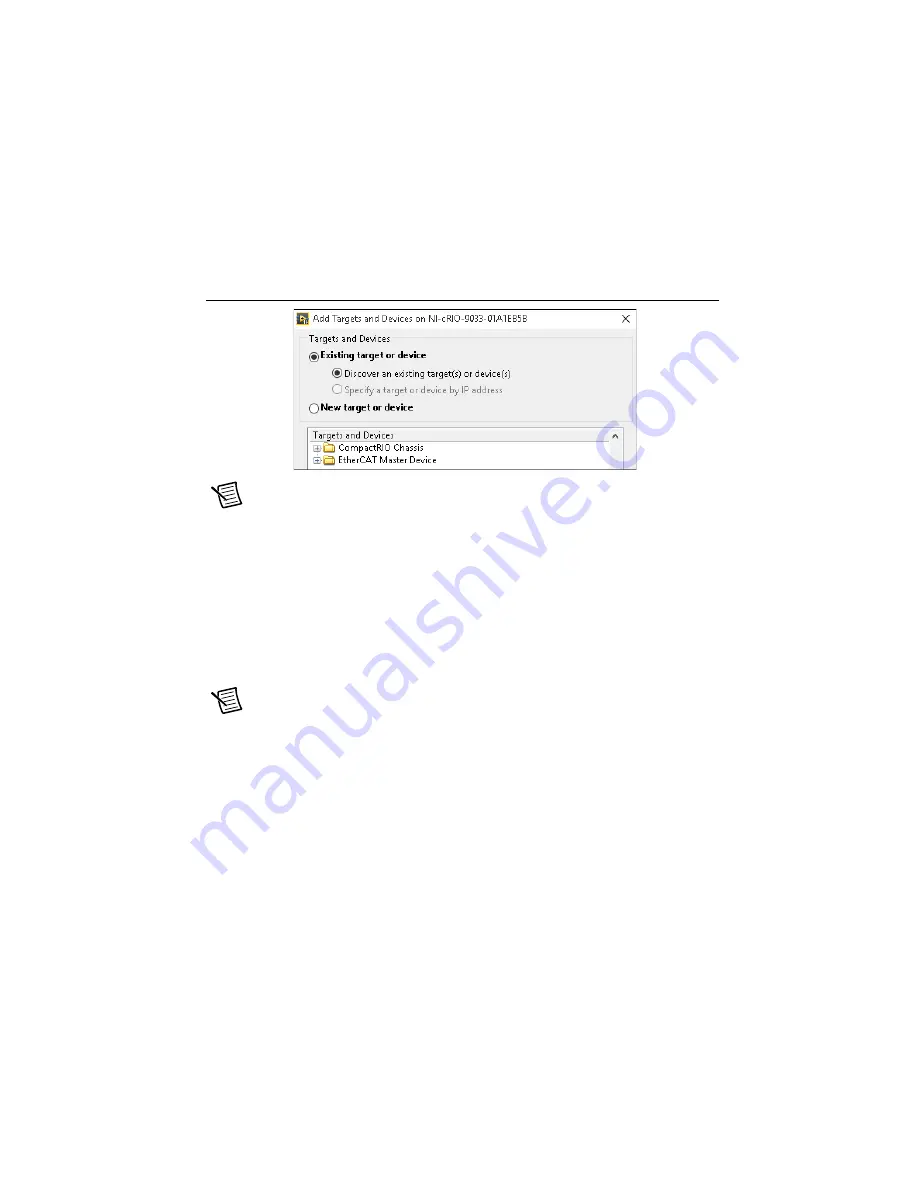
12. In the
Add Targets and Devices
dialog window shown in Figure 14, select
Existing target
or device
and expand the category EtherCAT Master Device to auto-discover the EtherCAT
port on the master controller. Click
OK
to add the master. It will automatically try to discover
any connected EtherCAT slaves. An EtherCAT master device can be added manually at any
time.
Figure 14.
Adding the EtherCAT Master
Note
When all the slave devices are discovered, the LabVIEW
Project Explorer
window lists each slave device and any installed C Series modules. If the AKD
EtherCAT drive does not appear in the
Project Explorer
window after this step,
confirm that the NI Scan Engine is in Configuration mode and repeat steps 11 and 12.
Refer to the
13. Right-click the controller item in the
Project Explorer
window and select
Properties
from
the shortcut menu to display the
RT Target Properties
dialog box. Select
Scan Engine
from the
Category
list to display the Scan Engine page.
14. Set the
Scan Period
to 8 ms or lower, then click
OK
to close the
RT Target Properties
dialog box.
Note
The
Scan Period
setting is used to determine the AKD EtherCAT drive
Cycle time and Cycle exp settings, ignoring any values in the
EtherCAT:
Advanced:Initial Commands
dialog box in the LabVIEW Project. These settings
must match for proper communication between the drive and the EtherCAT master.