





























Installing the Hardware
3-23
3
Completing the Installation
Starting the System
After completing the preparation and installation procedures, you
are ready to start up your system.
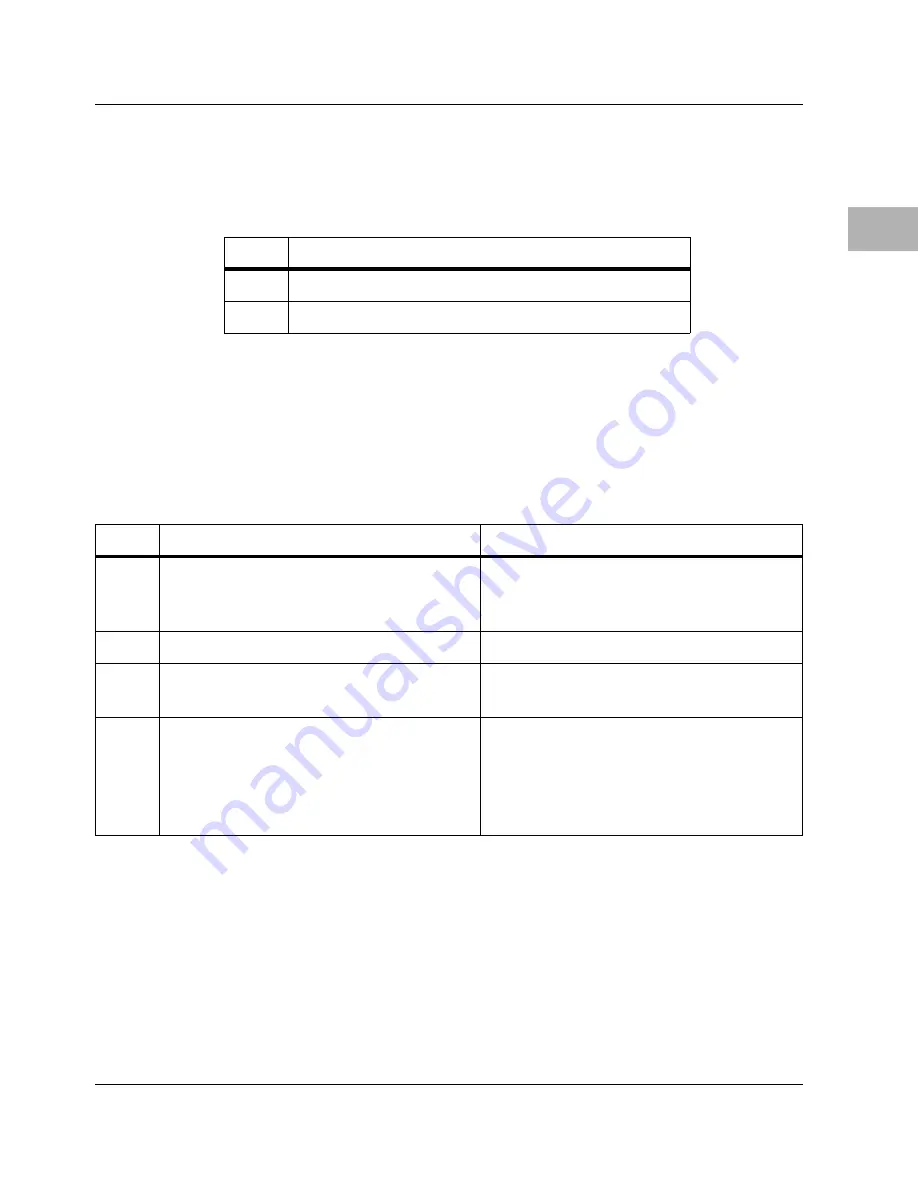
Table 3-13. Installation Completion Procedure
Step
Action...
1
Reassemble the chassis.
2
Reconnect the AC power.
Table 3-14. System Startup Overview
Stage
What you will need to do...
Refer to...
1
Power up the system and note that the
debugger prompt appears.
Page
3-24
;
Starting Up 167Bug
on page
4-6; and
the
MVME167Bug Debugging
Package User's Manual
.
2
Initialize the real-time clock.
Page
3-24
.
3
Examine and/or change
environmental parameters.
Page
3-24
and
ConÞgure and
Environment Commands
on page A-1.
4
Program the PCCchip2 and
VMEchip2.
System Considerations
on page 3-26
;
Memory Maps
on page 2-24
;
ASICs
on page 2-8
; and the
Single Board
Computer Programmer's Reference
Guide
.
Содержание MVME167 Series
Страница 1: ...MVME167 Single Board Computer Installation Guide MVME167IG D4 ...
Страница 6: ......
Страница 106: ...4 28 Debugger General Information 4 ...
Страница 132: ...5 26 Using the 167Bug Debugger 5 ...
Страница 146: ...A 14 Configure and Environment Commands A ...
Страница 152: ...B 6 Disk Tape Controller Data B ...
Страница 160: ...D 6 Troubleshooting the MVME167 Solving Startup Problems D ...
Страница 168: ...E 8 EIA 232 D Interconnections E ...







































































