


2
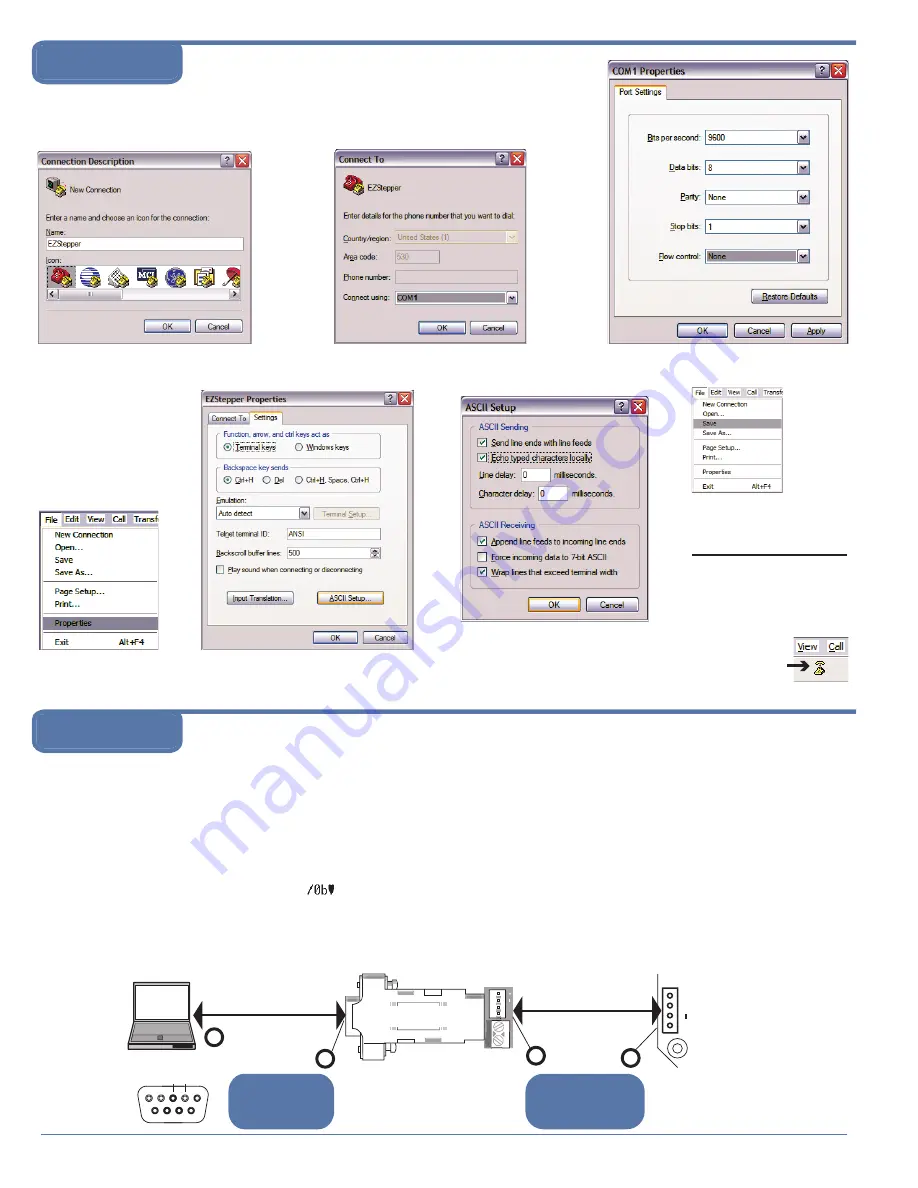
Open HyperTerminal by following this (typical) path:
Start/All Programs/Accessories/ Communications/ HyperTerminal/ HyperTerminal
The path shown is for Windows XP.
1
Make sure no other programs are using the comm port you
will be connecting to with HyperTerminal.
4
Select connection. Click
OK.
Note
that
USB uses higher port number.
5
Make the port settings shown above.
Click
Apply,
then click
OK.
7
Click the
ASCII Setup
button on the
Settings
tab.
8
Make selections shown above. Click
OK
, then click
OK
again.
Commands and responses will be
displayed as separate pairs.
3
Name the new connection and
select an icon. Click
OK.
Make sure address switch is detented exactly on position number 1.
(After resetting, power must be cycled to establish new address).
Turn off Palm Pilot Hotsync or other applications that use the comm port.
Re-check that correct com port is selected.
Issue "reconnect" command from HyperTerminal.
Confirm good ground between PC and power pupply. First measure
resistance with power off; then check for voltage drop with power on.
Repair poor ground connections.
Issue command /1<CR> and verify that the response " " is received. If
ok, motor connection may be miswired or loose. If not, continue to next item.
Check continuity of communication data to EZServo board at point 1 in
diagram below. If not present, check at other points shown. Suspect
failed component or faulty wiring/connector between point where signal
is present and last point where signal is absent.
If motor does not
respond to commands:
AB
RS485 Converter
EZ Bus cable
Serial cable
2
3
End of cable
(DB9 male)
4
Computer port
(if DB9)
Pins A & B
2
3
At the A & B pins , see
pulses same width as at
DB9, but 3V P-P and
centered on +2.5V
.
NOTE: Signal presence at point 1
suggests problem in motor, EZServo
board, or wiring to motor.
RS232-to-RS485 Converter
shown.
NOTE: Points 3 and 4 do not
apply when using USB-to-485
Converter.
If motor gives up partway through a move:
Query by issuing command /1Q. Overload error will be returned (upper or
lower-case i). Motor cannot keep up with the trajectory specified in the
command. Try the following:
Increase maximum move current with the "m" command to allow the motor
to move faster. For example /1m100R allows 100% current.
Reduce the velocity (V) and/or acceleration (L).
If motor cannot reach specified speed:
Increase supply voltage.
Increase maximum move current with the "m" command to allow the motor
to move faster. For example /1m100R allows 100% current.
You can also use the EZCommander™ Windows application to control your servomotor. To obtain the application, visit the part of our website for your product.
At DB9 connectors
pins 3 and 2, see 12V
P-P pulses 100
µ
sec
wide (@9600 baud)
9
Click
File/Save
to store
this connection. Now you're
ready to send commands.
You can open this connection
later by choosing
File/Open
from the HyperTerminal menu.
To change connection properties
later, first click the
Call/Disconnect
icon to terminate
the connection
.
6
In HyperTerminal, choose
File/Properties
.
1
Pins A & B
EZ Servo
+B
A
E Z S t a r t
All Motion
www.allmotion.com
5501 Del Oro Court, San Jose, CA 95124 Telephone 408.460.1345 Email
010906
Starting HyperTerminal
Troubleshooting