





Feature Highlights
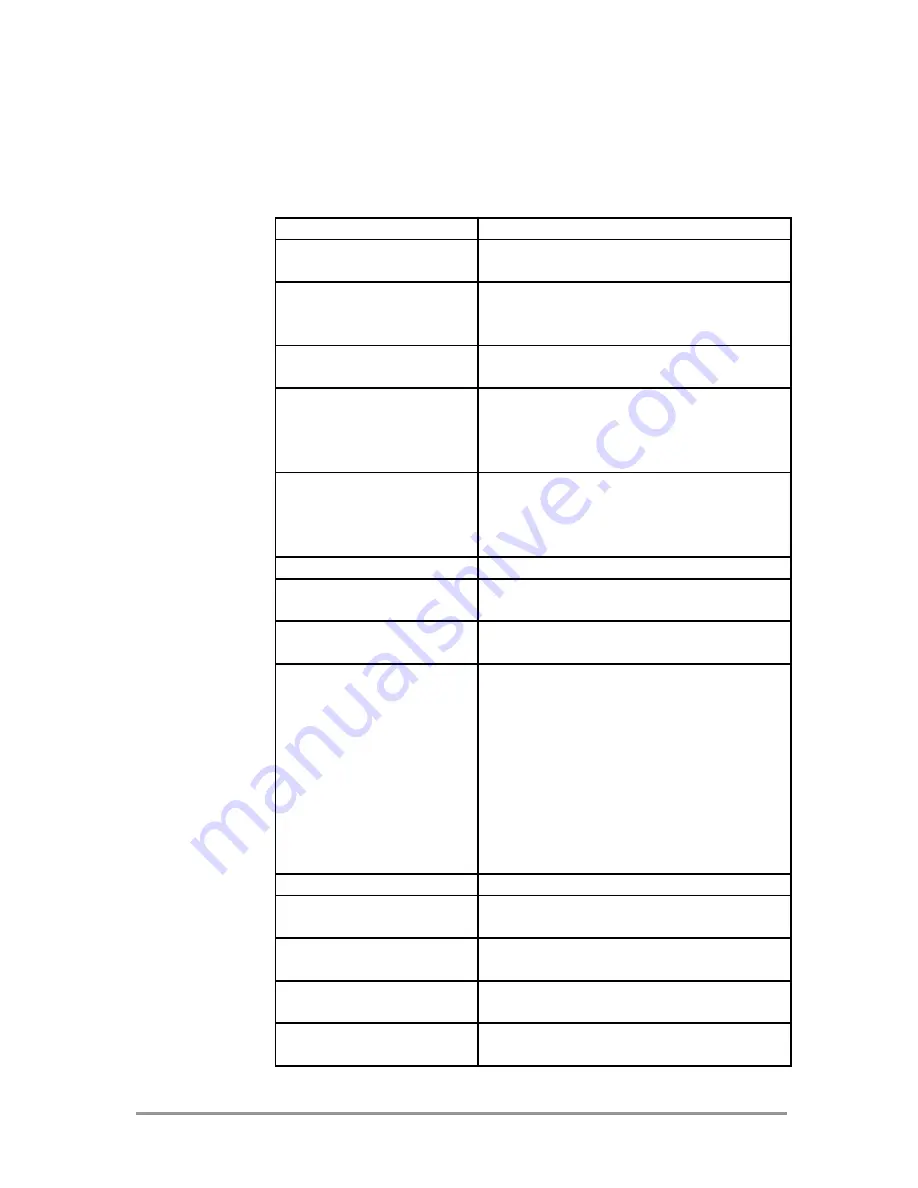
The table below lists important features provided by the PiStorms.
To use these features in your specific programming environment,
please refer to API help file or program header file.
Feature
Description
Timed Control of each
motor
Each motor can be run for a specified
duration of time.
Encoder control of each
motor
Each motor can be run from its current
Encoder position to a new position (with
or without a specific speed).
Speed control of each
motor
Speed of each motor can be controlled in
timed run or encoder based run.
Brake Vs Float while
stopping the motors
Each motor can be set to Brake (where
motor shaft can not be turned easily), Vs
Float (where motor shaft is free to
rotate by external force.
Holding Encoder position
At the end of run, hold the encoder
position (i.e. motor turned by external
force is restored to last set encoder
position).
Turning motor by degrees
Move it in forward or reverse direction.
Turning motor by
rotations
360 degrees makes one rotation.
Running operations
asynchronously
While a motor is running other operations
may be performed.
Running motors for
unlimited duration.
While motors are running, you can also
perform other operations.
NOTE: When
motors are set to run for ‘Unlimited
Duration’, they will continue to run until a
Stop command is issued (or power is
disconnected). In other words, after
starting the motors for ‘Unlimited
Duration’ if your program does something
else without stopping the motors, they
will continue to run.
Stopping motors abruptly.
Reading Motor Encoders
You can read the value of each encoder
from the PiStorms.
Reading from I2C sensors
You can read from various I2C sensors
connected to PiStorms.
Reading from EV3
Sensors
You can connect EV3 Sensors to your
PiStorms and read from it.
Reading from NXT Analog
Sensors
You can connect analog sensors to
PiStorms and read from them.
Copyright © 2016 mindsensors.com
3/6







































































