




















8I20 31
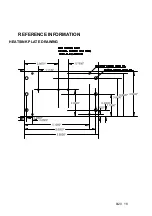
REFERENCE INFORMATION
SSLBP
DATA REGISTER
SSLBP has a global 8 bit data register for debug and custom setup purposes. This
register allows access to internal SSLBP parameters. The data register is right justified in
the 32 bit Hostmot2 register.
LOCAL READ OPERATIONS
The sequence used for reading a local SSLBP variable is as follows:
1. The parameter address ORed with the Request bit (bit 13) is written to the command
register.
2. The host polls the command register until it reads as zero.
3. The host reads the parameter byte from the data register
LOCAL WRITE OPERATIONS
The sequence used for writing a local SSLBP variable is as follows:
1. The host polls the command register until it reads as zero.
2. The host writes the data byte to the data register
3. The host writes the command register with the the parameter address Ored with both
the Request bit (bit 13) and the Write bit (bit 15)
NORMAL START
When the FPGA is first configured or after a STOP command, all local
communication, error and status parameters are initialized and all LBP communication
channels are idle. A normal START command begins to establish communications with
all remote LBP devices. A normal start command is issued by writing a Start bit with type
bits of 0,0,1 with a bit mask of the desired channels to start in the low byte (0x9NN) to the
command register. Once a start command has been issued, all channels that are selected
in the bit mask will be probed to determine if a LBP device exists. If a device exists on a
channel, the SSLBP firmware will acquire the device type and device unit ID from the
remote device. When the command completes (the command register is clear), the data
register can be read to determine if all selected channels have started. A 1 bit in any
position in the data register indicates that the corresponding channel has failed to start. If
a channel has failed to start, more information about the failure can be determined by
reading the CS register.







































































