





















MegaRobo
1-4
MRX-T4 User Manual
1.3
Product specification
Model
MRX-T4
Freedom degree
4
Maximum load
≤3kg
Repeated positioning
accuracy
±0.05mm
End linear speed
500mm/s
Weight
15kg
Working radius
505mm
Base mounting dimensions
φ140mm
Mounting hole 8-φ6/45° (uniform distribution)
Axis range of motion
J1: ±170°
J2: -20°~90°
J3: ±120°
J4: ±180°
Maximum speed of each
axis
180°/s
Installation
Desktop
Software
MegaRobo Studio
Communication interface
CAN, USB/WiFi/LAN
Power supply
100-240V, 50/60Hz
Power consumption
240W under normal conditions
Operating temperature
10
°C
-45
°C
Storage temperature
-10
°C
-60
°C
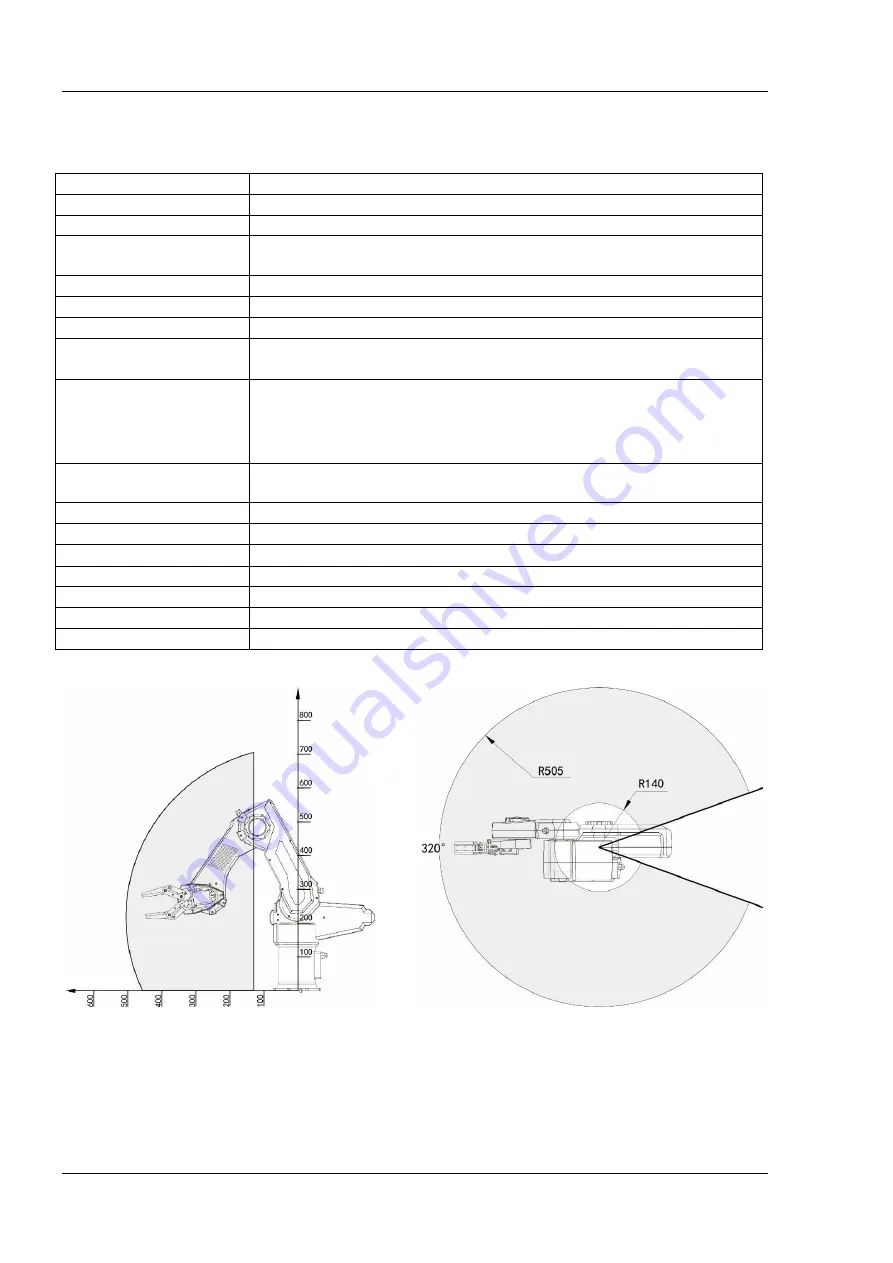
Figure 1-4 MRX-T4 Workspace Schematic Diagram







































































