



















Troubleshooting and fault elimination
System error messages
General error messages
36
EDKVF93−05 EN 2.0
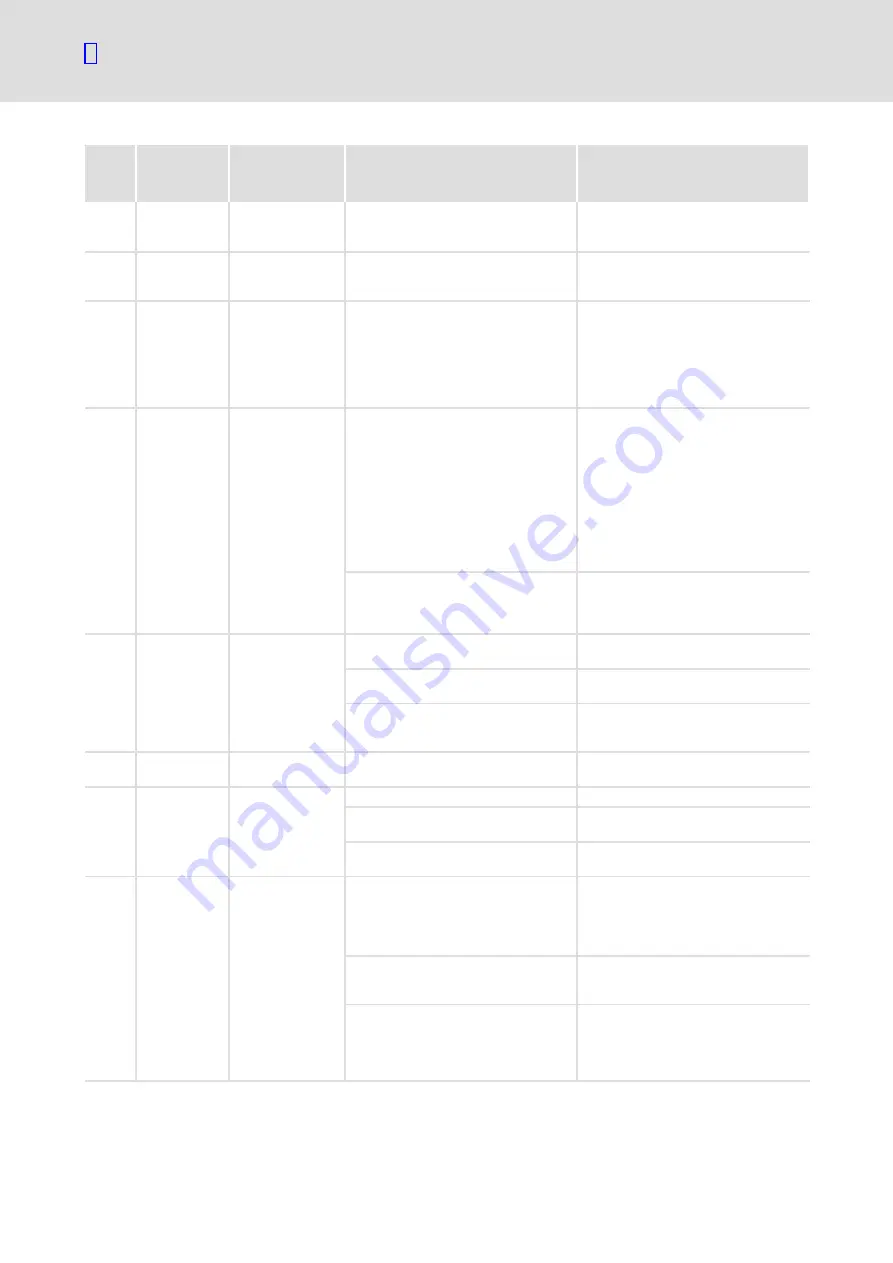
Remedy
Cause
Error
Error number
x = 0: TRIP
x = 1: Message
x = 2: Warning
Display
H10
x110
Sensor fault −
heatsink
temperature
Sensor of the heatsink temperature
detection indicates undefined values
Contact Lenze
l
Fault message can only be reset by
mains switching
H11
x111
Sensor fault −
temperature inside
the device
Sensor of the internal temperature
detection indicates undefined values
Contact Lenze
l
Fault message can only be reset by
mains switching
ID1
x140
Error during motor
data identification
l
No motor connected
l
Stator resistance too high
l
Controller inhibited externally
l
Check motor connection
l
Check motor data entry
l
Enable controller and repeat motor
data identification. The controller
enable must be pending
continuously until the end of the
identification process.
ID2
x141
Error during motor
data identification
Motor too small
l
Check entered motor data
– When setting parameters with
Global Drive Control, use the input
assistant for motor data
l
The measurements for the inverter
error characteristic and the stator
resistance are correct (save measured
values in C0003). In the operating
mode U/f characteristic control, the
motor data identification can be
completed.
Controller inhibited externally
Enable controller and repeat motor data
identification. The controller enable
must be pending continuously until the
end of the identification process.
LP1
x032
Motor phase
failure
A current−carrying motor phase has
failed
l
Check motor
l
Check supply cables
The current limit is set too high
Set a lower current limit value under
C0599
This monitoring is not suitable for field
frequencies >480 Hz and synchronous
servo motors
Deactivate monitoring with C0597= 3
LU
x030
Undervoltage
DC bus voltage is smaller than the value
set under C0173
l
Check mains voltage
l
Check supply module
NMAX
x200
Maximum system
speed exceeded
(C0596)
Active load too high
Check drive dimensioning
Drive is not speed−controlled, torque
excessively limited
If required, increase torque limit
Current speed is detected incorrectly
Check parameter setting of the
incremental encoder (C0025)
OC1
x011
Overcurrent
(motor current >
2.25−fold rated
controller current,
hardware
monitoring)
Short circuit/earth fault
l
Remove cause of short circuit/earth
fault
l
Check motor and cable
l
If required, measure the insulation
resistance
Capacitive charging current of the
motor cable too high (especially with
lower powers)
Use shorter or low−capacitance motor
cable
Acceleration/deceleration times too
short in proportion to the load (C0012,
C0013, C0105)
l
Increase the gain (P component) of
the current controller (C0075)
l
Reduce integral−action time (integral
action component) of the Imax
controller (C0076)







































































