





























TK-80
93
When this control, when the VSWR is 1.6 or more, the
motor runs fast since the duty cycle of the motor drive volt-
age pulse is 100%. When the VSWR is 1.1, the duty cycle
becomes about 60% and the motor runs slowly.
The matching circuit is a T type. The tap position from 2.0
to 30MHz is controlled by seven relays, K101 to K107.
Position detection potentiometers VR101 and VR102 are
linked to the spindles of variable capacitors VC101 and VC102
with a gear ratio of 1:1. Voltages of 0 to 5V (POD1 and POD2)
are produced according to the positions of the variable ca-
pacitors. This position data is input to the CPU through the
A/D converter by the control unit, and is used as the refer-
ence voltage in the feedback control system. That is used for
preset antenna tuning. The same signal is also used for pre-
set data and to signal the completion of antenna tuning.
The potentiometers used here are not ones that rotate
through 360 degrees. Since the TK-80 limits the rotation
angle of each potentiometer, the rotation range is from the
minimum capacitance to the maximum capacitance, plus a
little extra for headroom.
Through this control, like preset antenna tuning, which will
be described later, POD1 and POD2 are monitored by the
microprocessor. If the lower limit voltage of 1.0V or the up-
per limit voltage of 4.0V is reached, the microprocessor rec-
ognizes that a variable capacitor is close to one of its limits.
To return the voltage to the opposite side, APRE is switched
high. For VC101, if the voltage is close to the lower limit with
respect to PRE1, the voltage near the upper limit is output. If
the voltage is close to the upper limit with respect to PRE1,
the voltage near the lower limit is output.
The other variable capacitor, VC102, should be fixed. If
the variable capacitor voltage exceeds the specified limit, the
variable capacitor is returned to the opposite limit. The other
variable capacitor remains in the same position.
The motor direction is determined by the CPU, unless
auto antenna tuning is performed with high APRE.
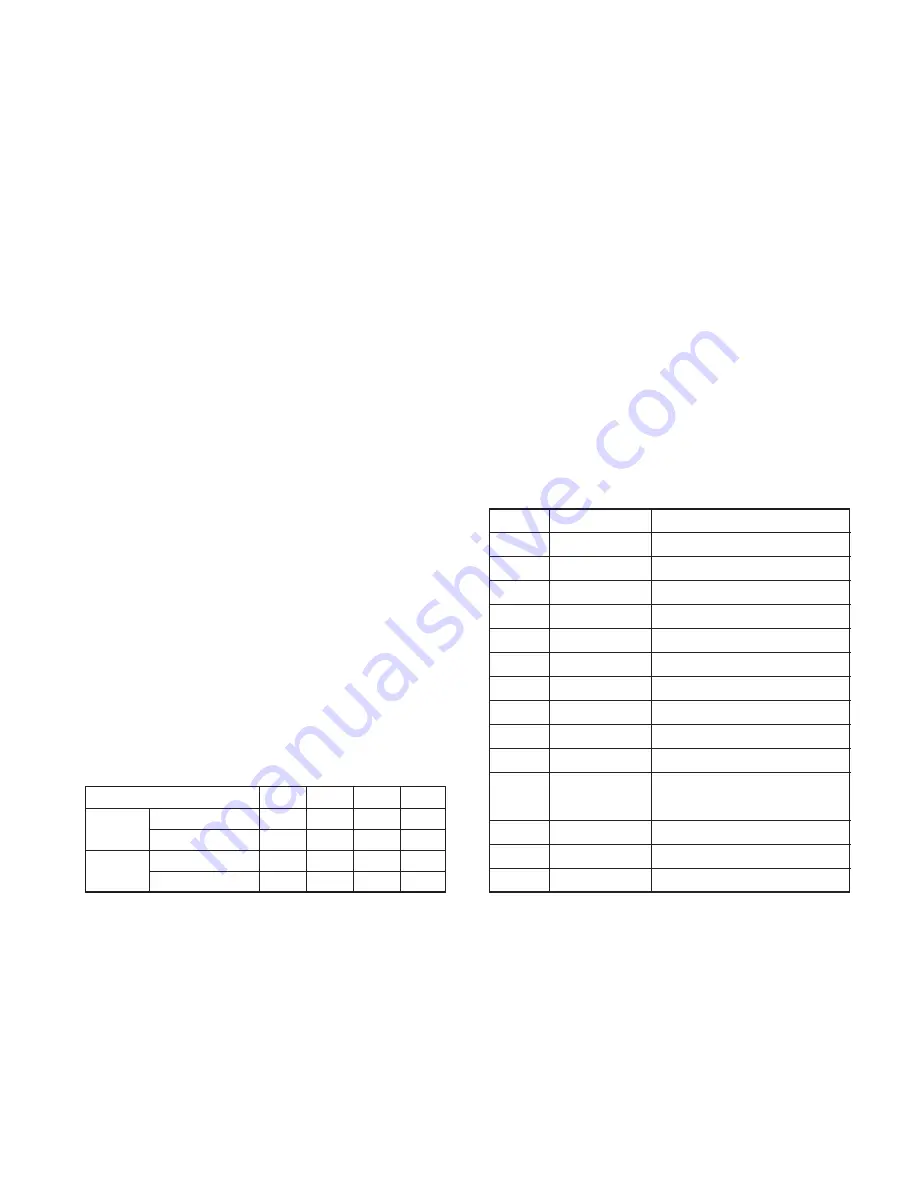
The logic of PR11 to PR22 is the same as that of IC4 and
IC5. The signal output from the control unit passes through
IC2 and IC3 and is input to IC4 and IC5.
PR11
PR12
PR21
PR22
Motor 1
Forward rotation
H
L
-
-
Reverse rotation
L
H
-
-
Motor 2
Forward rotation
-
-
H
L
Reverse rotation
-
-
L
H
Components Description
AT UNIT (X53-3630-20)
Ref. No.
Use / Function
Operation / Condition
IC1
D-FF
IC2
Analog switch
For control changeover motor 1
IC3
Analog switch
For control changeover motor 2
IC4
Motor driver
For motor 1
IC5
Motor drive
For motor 2
IC6
Comparator
Amplification difference detection
Q1,2
Amplifier
Waveform shaping
Q3
Switching
ON when APRE “H”
Q4,5
Switching
Motor speed control pulse
Q6
Switching
K1 relay changeover
D1,2
Detection
Current component ampification
detection
D3~8
Switching
Clipper
D9
Switching
Spike absorption
D101~107
Switching
Spike absorption
KAT-2 (Internal Automatic Antenna Tuner)
3. Preset tuning
When auto antenna tuning ends, the position of the vari-
able capacitors is stored in memory by the microprocessor as
preset data for each channel.
When a memory channel that has been tuned once
changed back from another memory channel, APRE goes
high, the motors are controlled by the microprocessor, and
preset antenna tuning takes place. During preset antenna
tuning, transmission is inhibited even if the transceiver is
ready to transmit.
The initial preset data when writes a memory by dealer
includes standard data for 50
Ω
load on 1MHz step from 2.0
MHz.
Содержание TK-80
Страница 62: ...TK 80 61 LEVEL DIAGRAM Local Oscillator Section ...
Страница 83: ...TK 80 76 INTERCONNECTION DIAGRAM ...
Страница 84: ...TK 80 77 INTERCONNECTION DIAGRAM ...
Страница 85: ......
Страница 103: ...TK 80 90 BLOCK DIAGRAM ...
Страница 104: ...TK 80 91 BLOCK DIAGRAM ...
Страница 105: ......







































































