





























Guidance
Terminology
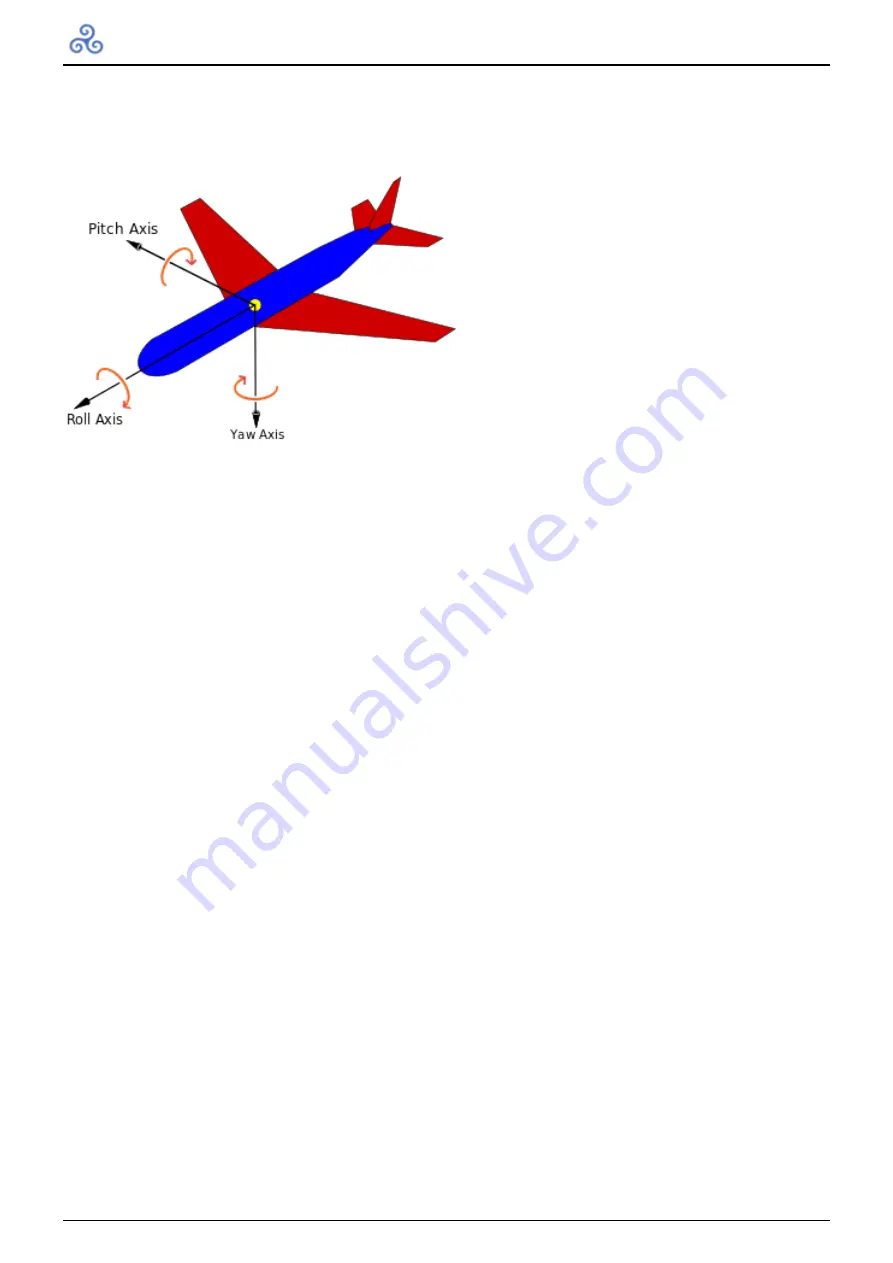
Pitch, Roll and Yaw
Pitch, Roll and Yaw are measures of angular rotation about an object’s center of mass, and together
provide a measure of “orientation” of that object with respect to an “at rest” position. When units of
degrees are used, their range is from -180 to 180 degrees, where 0 degrees represents the “at rest”
position of each axis.
Axis
Orientation relative to object’s
center of mass
Rotational Motion
X (Pitch)
Left/Right
+ Tilt Backwards
Y (Roll)
Forward/Backward
+ Roll Left
Z (Yaw)
Up/Down
+ Clockwise/ – Counter-
wise
Important Note: Pitch, Roll and Yaw angles represent rotation from the “origin” (0,0,0) of a 3-axis
coordinate system. navX-sensor Pitch and Roll angles are referenced to earth’s gravity – so when a navX-
sensor is flat, Pitch and Roll angles should be very close to 0.
The Yaw angle is different – Yaw is not referenced to anything external. When navX-sensor startup
calibration completes, the Yaw angle is automatically set to 0 – thus at this point, 0 degrees represents
where the “head” of the navX-sensor circuit board is pointing. The Yaw angle can be reset at any time
after calibration completes if a new reference direction is desired.
Linear Acceleration
Linear Acceleration is a measure of the change in velocity in a specific direction. For example, when a
car starts from a standstill (zero relative velocity) and travels in a straight line at increasing speeds, it is
accelerating in the direction of travel.
Axis
Orientation
Linear motion
X
Left/Right
– Left / + Right
62
Содержание navX2-MXP
Страница 1: ...navX2 MXP Robotics Navigation Sensor User Guide Kauai Labs Creative Commons BY 2020...
Страница 13: ...Installation RoboRIO Installation 10...
Страница 20: ...Installation Orientation 17...
Страница 24: ...Installation I O Expansion 21...





















































