





























Chapter
3
Operation,
Display
and
Trial
Running
16
cannot be modified. This may be because:
Such a function code is only readable, such as, servo drive model, actually detected
parameter and running record parameter.
Such a function code cannot be modified in the running state and can only be
changed at stop.
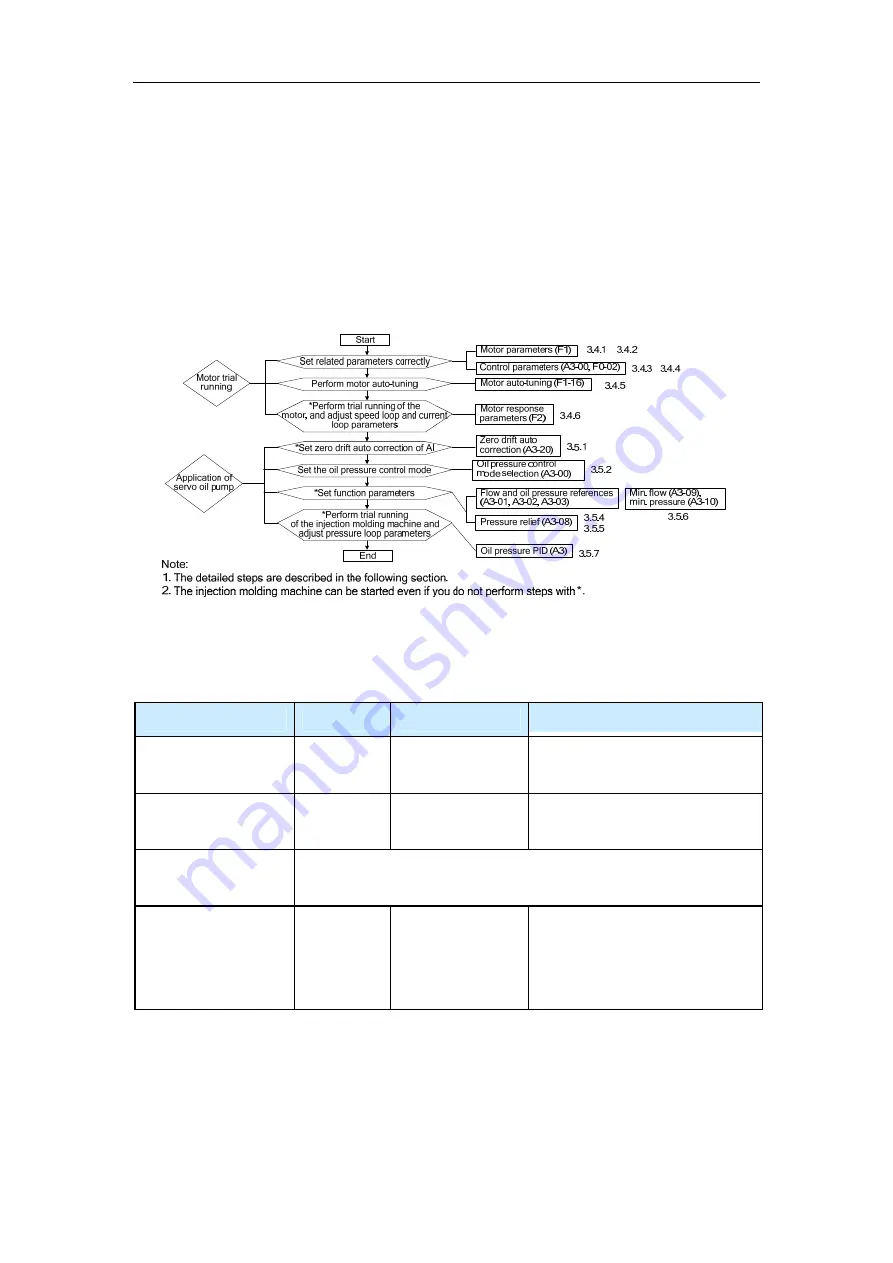
3.3 Flowchart of Commissioning the Servo Hydraulic Pump
Figure 3-4 Flowchart of commissioning the servo hydraulic pump
3.4 Motor Trial Running
3.4.1 Motor Trial Running Procedure
Procedure
Pr. Setting
Value
Description
1. Set the control mode. A3-00 = 0
Non-hydraulic
control mode
The servo drive is set to the
non-hydraulic control mode.
2. Set the command
source.
F0-02 = 0
Operation panel
control
The LOCAL/REMOT indicator on the
operation panel becomes OFF.
3. Perform motor
auto-tuning.
For details, see section 3.4.3 “Setting and Auto-tuning of Motor
Parameters”.
4. Perform motor trial
running
F0-08
Trial running
frequency.
Start trial running in operation panel
control and monitor whether the output
current is normal and whether the
motor runs stably.
3.4.2 Trial Running Check
1) Check whether the running direction of the servo drive is correct. If not, exchange any
two phases of UVW, re-perform motor auto-tuning and then perform motor trial
running.
2) If the motor runs abnormally, check the motor parameters in group F1 and the setting







































































