





























Everest XCR - Product manual |
Wiring and Connections
INGENIA | 2020-10-01 00:04:38
47
•
•
•
9.4. Safe Torque Off (STO)
The STO is a safety system that prevents motor torque in an emergency event while Everest XCR remains connected
to the power supply. When STO is activated, the power stage is disabled by hardware and the drive power
transistors are disconnected, no matter what control or firmware does. The motor shaft will slow down until it stops
under inertia and frictional forces. Although not common, in the event of a failure of the power stage during an STO
situation, the maximum expected motor movement with torque can be up to 180º electrical degrees. The system
must be designed to avoid any hazard in this situation.
If the STO inputs are not energized or the wires are not connected, the transistors of the power stage are turned
off and an STO fault is notified. In order to activate the power stage, and therefore allow the motor operation, the
two STO inputs must be energized (high level, typically 5V to 24V). STO inputs should not be confused with a digital
input configured as enable input, because enable input is firmware controlled and does not guarantee intrinsic
safety as it can be reconfigured by a user.
In order to ensure redundancy and safety, the Everest XCR includes 2 separate STO inputs that must be activated or
deactivated simultaneously (maximum 1.4 s mismatch). A difference of state between STO1 and STO2 inputs will be
interpreted as an abnormal situation after 1.4 s the drive will be latched in a fault state.
A power supply reset is
necessary to remove this STO abnormal error.
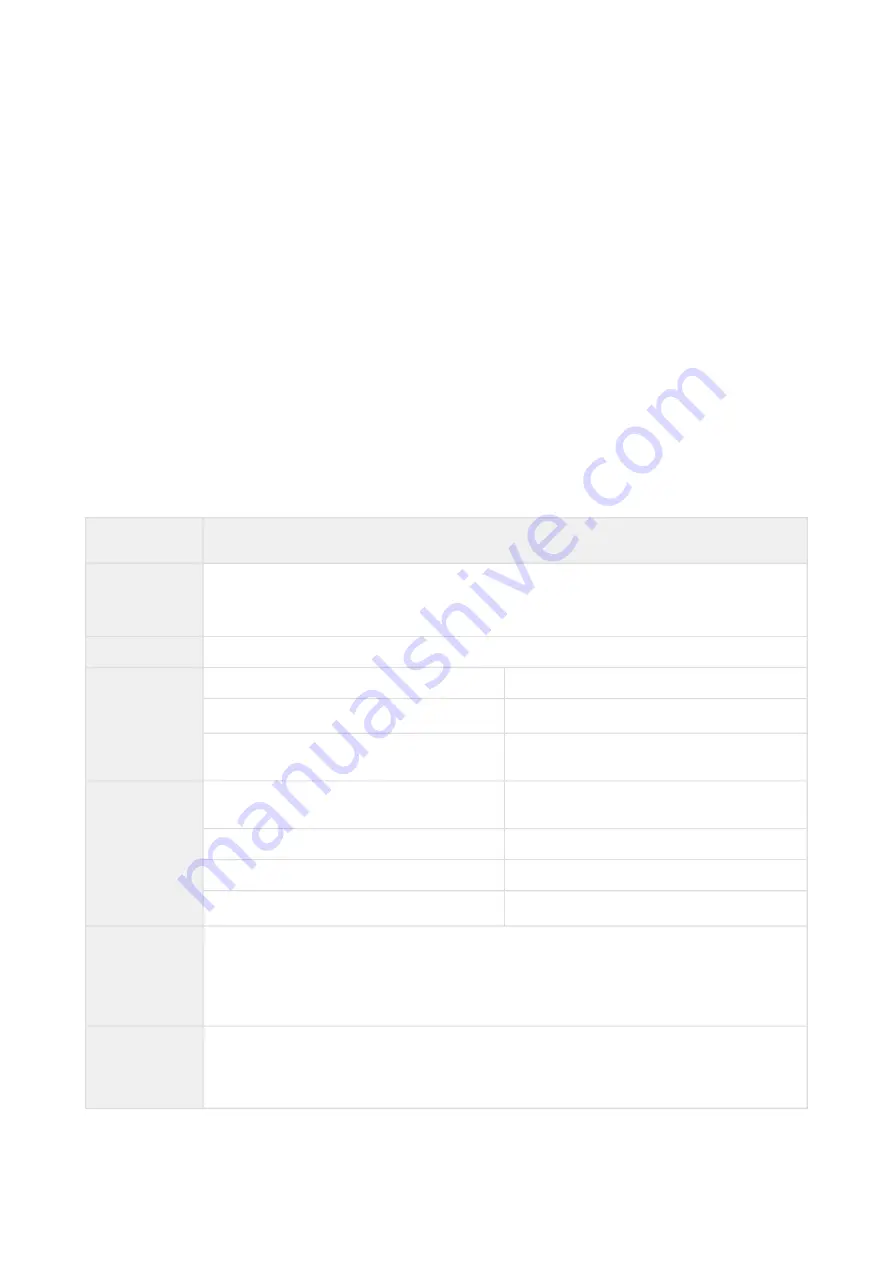
9.4.1. Safety Function Specifications
Safety Function
Specification
Value
Standards
compliance
IEC 61800-5-2:2016
IEC 61508:2010
EN ISO 13849-1:2015
Safety function
Safe Torque Off (STO)
Safety relevant
parameters
according to
IEC 61508:2010
Safety integrity level
SIL3
PFH
1.31 x 10
-9
1/h
SFF
> 99 % (High)
Safety relevant
parameters
according to
EN
ISO
13849-1:2015
PL
e
Category
3
DC
99% High
MTTFd
≥
100 years (High)
Safety Function
Reaction Time
t < 6.3 ms
The Safety Function Reaction time is measured as the time since one of the STO inputs (STO1
or STO2) goes below 1.1 V and the STO function actuates (power transistors deactivated).
Fault Reaction
Time
t< 33 ms
The worst-case fault reaction time is on the event of a 5V DC/DC supply overvoltage.
Содержание 2147502492
Страница 31: ...Everest XCR Product manual Connectors Guide INGENIA 2020 10 01 00 04 38 31 Image TE B 155 9001...
Страница 72: ...Everest XCR Product manual Wiring and Connections INGENIA 2020 10 01 00 04 38 72...
Страница 85: ...Everest XCR Product manual Installation INGENIA 2020 10 01 00 04 38 85...







































































