





























Data Sheet
56
Rev. 1.00
2017-07-31
TLE9262-3BQX
5.4.7
CAN Flexible Data Rate (CAN FD) Tolerant Mode
The CAN FD tolerant mode can be activated by setting the bit
CAN_FD_ EN
= ‘1’ in the register
SWK_CAN_FD_CTRL
. With this mode the internal CAN frame decoding will be stopped for CAN FD frame
formats:
• The high baudrate part of a CAN FD frame will be ignored,
• No Error Handling (Bit Stuffing, CRC checking, Form Errors) will be applied to remaining CAN frame fields
(Data Field, CRC Field, …),
• No wake up is done on CAN FD frames.
The internal CAN frame decoder will be ready for new CAN frame reception when the End of frame (EOF) of a
CAN FD frame is detected.The identification for a CAN FD frame is based on the EDL Bit, which is sent in the
Control Field of a CAN FD frame:
• EDL Bit = 1 identifies the current frame as an CAN FD frame and will stop further decoding on it.
• EDL Bit = 0 identifies the current frame as CAN 2.0 frame and processing of the frame will be continued
.
In this way it is possible to send mixed CAN frame formats without affecting the selective wake functionality
by error counter increment and subsequent misleading wake up.In addition to the
CAN_FD_ EN
bit also a filter
setting must be provided for the CAN FD tolerant mode. This filter setting defines the minimum dominant time
for a CAN FD dominant bit which will be considered as a dominant bit from the CAN FD frame decoder. This
value must be aligned with the selected high baudrate of the data field in the CAN network.
To support programming via CAN during CAN FD mode a dedicated SPI bit
DIS_ERR_ CNT
is available to avoid
an overflow of the implemented error counter (see also
Chapter 5.4.2.4
).
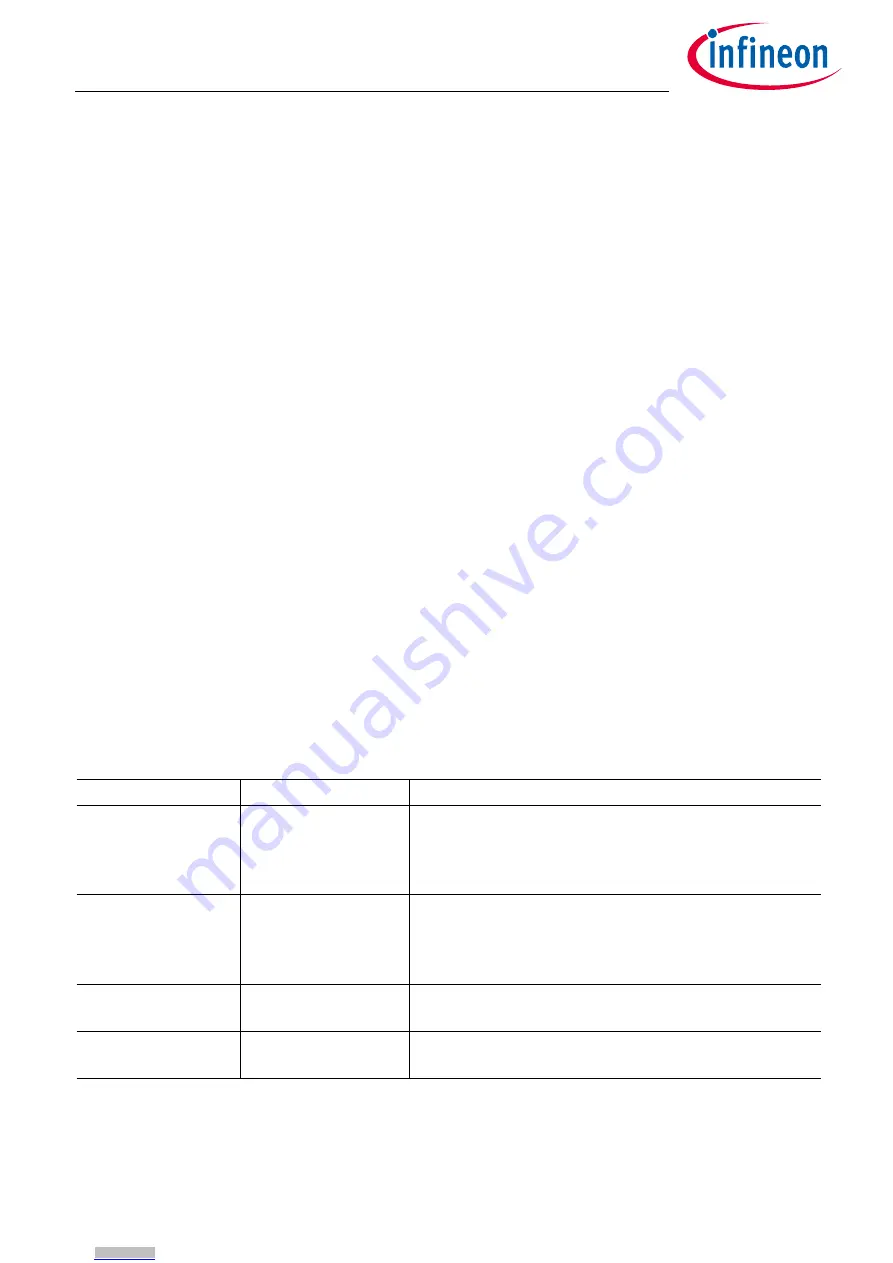
The behavior of the error counter depends on the setting of the bits
DIS_ERR_ CNT
and
CAN_FD_ EN
and is
show in below table:
The
DIS_ERR_ CNT
bit is automatically cleared at Tsilence (
t
SILENCE
) expiration.
Table 14 Error Counter Behavior
DIS_ERR_ CNT
setting
CAN_FD_ EN
setting
Error Counter Behavior
0
0
Error Counter counts up when a CAN FD frame or an
incorrect/corrupted CAN frame is received; counts down
when a CAN frame is received properly
(as specified in ISO 11898-2:2016)
1
0
Error Counter counts up when a CAN FD frame or an
incorrect/corrupted CAN frame is received; counts down
when a CAN frame is received properly
(as specified in ISO 11898-2:2016)
0
1
Error Counter counts down when correct CAN (incl. CAN FD)
frame is received
1
1
Error Counter is and stays cleared to avoid an overflow
during programming via CAN
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from
Downloaded from