

























prel
imin
ary
prel
imin
ary
iC-TW29
26-BIT ENCODER PROCESSOR
WITH INTERPOLATION AND BiSS INTERFACE
Rev C1, Page 17/28
FUNCTIONAL BLOCK DIAGRAM
Interpolated Angle (IA)
SPI
Interface
xSS
SCK
SO
SI
Interpolator
ZERO
Channel
SIN+
SIN–
COS+
COS–
ZERO+
ZERO–
26-Bit
Gearbox
Includes
Filter,
Hysteresis,
and
Eccentricity
Correction
Zero Gating Window (ZW)
ABZ with
Output Freq.
Limiter
Normalized Angle (NR)
Revolution Count (RC)
UVW
BiSS Slave
with Encoder
Profile and
EDS
UVW Scan
Absolute Data
Interface
(ADI)
Revolution Count (RC),
Cycle Count (CC), and Sync Bits
I/O
Multiplexer
A+
A–
B+
B–
Z+
Z–
Auto Calibration,
Auto Adaption,
LED Control, Startup,
ID, EEPROM
xCALIB
xIRQ
LED
Position
Capture
Bi
SS
C
on
tro
l D
at
a
Encoder Link
Monitors:
Status/Fault, Temp.,
Sin/Cos Amplitude,
Excessive Error,
Excessive Adaption
GPIO
IA
CC
RC
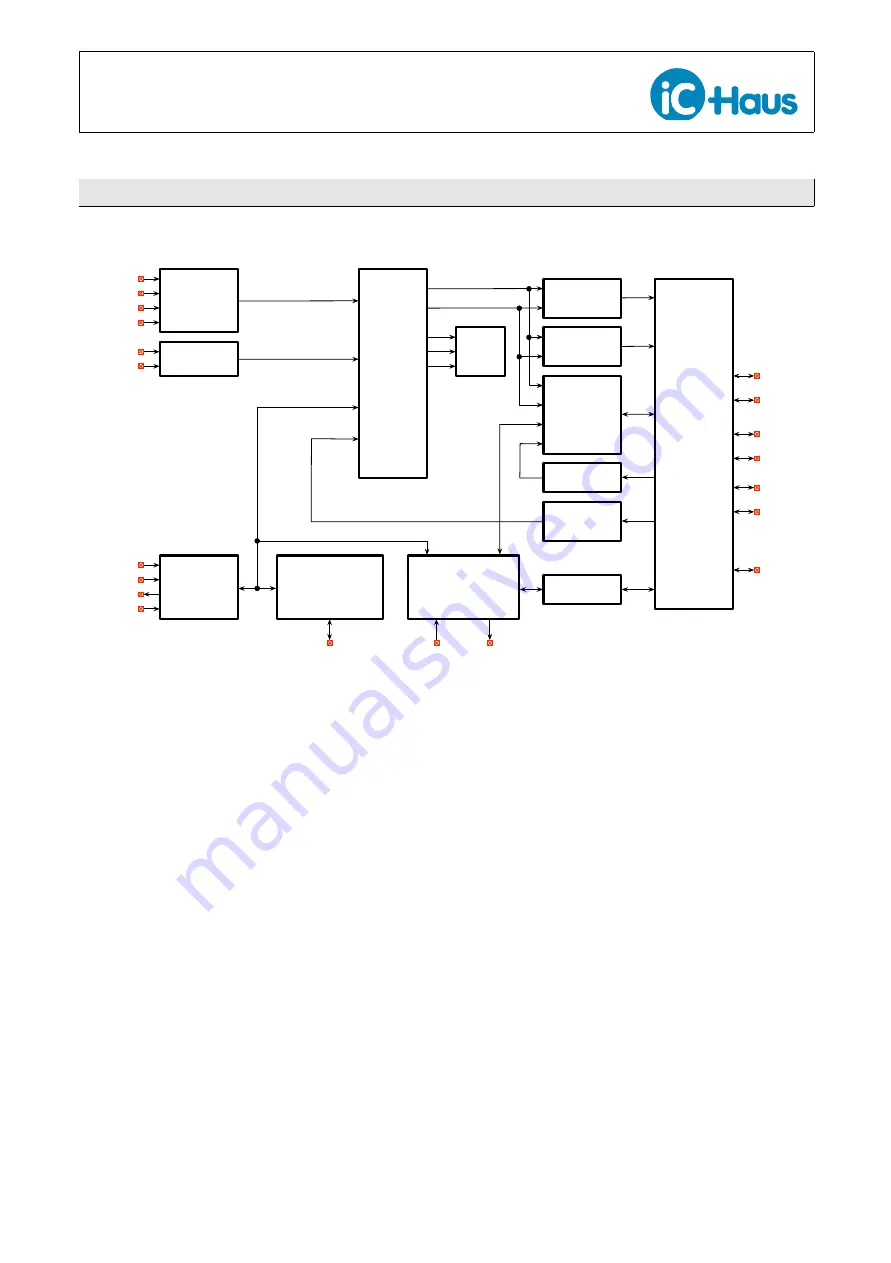
Figure 14: Functional Block Diagram
The iC-TW29 uses a modular architecture as shown in
Figure 14.
Differential sine and cosine sensor signals are con-
verted to a 14-bit interpolated angle (IA) within one
input cycle by the interpolator. The interpolator also
provides complete analog and digital error correction
for the input signals to ensure lowest angular error and
jitter. A sophisticated digital filter with fixed or variable
bandwidths improves performance with noisy inputs.
The zero channel generates the zero gating window
(ZW) from analog or digital zero or index sensors which
can be used to generate a traditional once-per-revo-
lution Z output. The ZERO input can also be used to
reset the gearbox counter and to capture the current
full absolute position of the iC-TW29.
The gearbox tracks the input cycles within a revolution
and provides a normalized 26-bit output representing
the angle within one output revolution (NR). This is
synchronized with the revolution count (RC) and the
cycle count (CC) from the absolute data interface (ADI)
or SPI port to form the complete absolute position. A
programmable noise and jitter filter increases angle res-
olution by two or more bits depending on configuration.
Hysteresis and eccentricity correction
The full absolute position value of the iC-TW29 can be
captured and read out over the SPI port. This posi-
tion capture takes place on the rising edge of the zero
gating window and can also be configured to generate
an interrupt. The most recent four absolute position
values are saved in a FIFO. This allows touch-probe or
distance-coded index applications to be easily imple-
mented.
Traditional encoder quadrature (ABZ) outputs are avail-
able as RS-422 compatible differential or single-ended
signals depending on device configuration. The ABZ
output resolution (edges or AB cycles per revolution) is
programmable and independent of the input resolution
(input cycles per revolution). The zero gating window
(ZW) from the zero signal path can be used to gener-
ate a programmable-width Z output synchronized with
the AB outputs. The Z output can also be synthesized
from absolute position data when the ZERO input is not
used.
The ABZ output module incorporates a programmable
AB output frequency limiter that guarantees a minimum
separation time between AB edges. This is useful to
avoid counting errors with PLCs or counters with input
frequency limits less than the 12.5 MHz maximum AB
output frequency of the iC-TW29.







































































