





















Instruction Manual HIPERDRIVE with EtherCAT
32
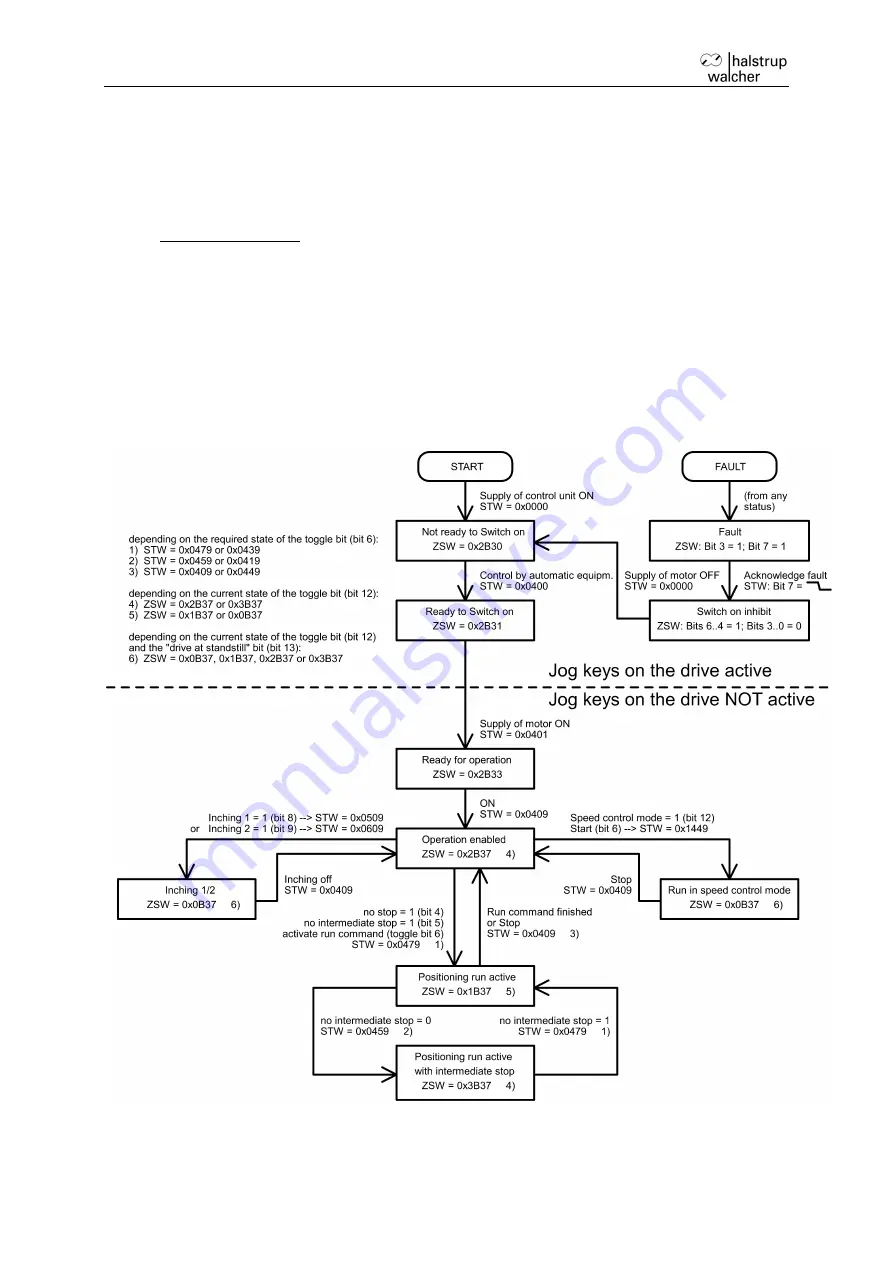
5.6 Flow chart
The following flow chart shows the possible states of a drive as well as the transitions
between the states.
Abbreviations used:
STW = Control word
ZSW = Status (
“status word”)
The requirement for each run is that the
“percentaged target speed” and
“percentaged maximum torque” have a value > 0. In addition, for a run command, the
target position must be set to a permitted value.
Any jog keys which are eventually present at the drive are only active in the states
“Not ready to Switch on”, “Ready to Switch on”, “Fault” and “Switch on inhibit”. In all
other cases, the PLC has sole access to the drive.
























































