




























14 | 45
the aircraft will flash quickly and the aircraft will be forced to land.
※
The stick can be also used to control the aircraft to land at a proper place in the course of landing.
※
The automatic low power return occurs only once in the same flight.
※
When the power for return is not enough and when it is excessively low, the user shall land the aircraft as soon as
possible.
3. Lost return
Where there is a good GPS signal, a normally functioning compass, and a successfully recorded return point by
aircraft, yet the signal between remote control and aircraft is interrupted, the aircraft will continue hovering; If
this signal continues to be interrupted for more than 15s, the aircraft will return automatically. If the signal is
restored on the way to the return point, the return process will continue, and the user can cancel the return by
shortly pressing the “one-click return” button on the remote control or the
App icon.
Obstacle avoidance during return
If the light conditions satisfy the visual system in the course of the return, with the obstacle avoidance function
enabled under the standard mode, the aircraft will, in the case of encountering an obstacle ahead, hover 2m
away from the obstacle, rise to avoid the obstacle and then return at the original height.
※
There is no obstacle avoidance under the sports mode during the return.
※
The obstacle avoidance function during return is closed by default. Please start it in the settings of the App if
necessary.
Intelligent Vision System
The intelligent vision system is composed of the forward vision system and downward vision systems. The
forward vision system is placed at both sides of the nose, and includes a binocular vision sensor that senses
obstacles by visual image ranging. The downward vision system is placed at the bottom of aircraft and includes
a optical flow sensor and an ultrasonic sensor. The light stream is used to obtain the location information of the
aircraft, thus providing horizontal location references for the aircraft, while the ultrasonic wave is used to judge
the current flight height and provide reference for the distance from the ground to the aircraft to realize a fixed
flight height.
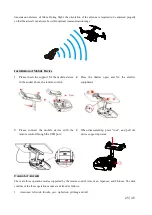
Detection Range
The detection range of the forward and downward vision systems are shown in the figure below. The aircraft
cannot effectively avoid an obstacle if the obstacle is out of the effective range and therefore the flight must be
carefully operated .